# Kakute F7
The Kakute F7 from Holybro is a flight controller board designed for racers.

Note This flight controller is manufacturer supported.
# Key Features
- Main System-on-Chip: STM32F745VGT6
- CPU: 216 MHz ARM Cortex M7 with single-precision FPU
- RAM: 320 KB SRAM
- FLASH: 1 MB
- Standard racer form factor: 36x36 mm with standard 30.5 mm hole pattern
- ICM20689 Accel / Gyro (Soft-mounted)
- BMP280 Baro
- microSD (for logging)
- 6 UARTs
- 1 I2C bus
- 6 PWM outputs
- Built-in OSD chip (AB7456 via SPI)
# Where to Buy
The board can be bought from one of the following shops (for example):
Tip The Kakute F7 is designed to work with the Tekko32 4-in-1 ESC and they can be bought in combination.
# Connectors and Pins
This is the silkscreen for the Kakute F7, showing the top of the board:
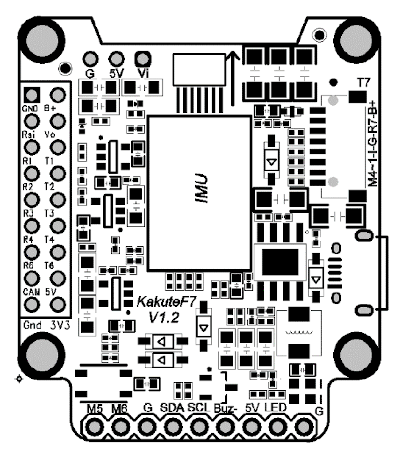
| Pin | Function | PX4 default |
|---|---|---|
| B+ | Battery positive voltage (2S-6S) | |
| 5V | 5V output (2A max) | |
| VO | Video output to video transmitter | |
| VI | Video input from FPV camera | |
| G or GND | Ground | |
| SDA, SCL | I2C connection (for peripherals) | |
| R1, T1 | UART1 RX and TX | TELEM1 |
| R2, T2 | UART2 RX and TX | TELEM2 |
| R3, T3 | UART3 RX and TX | NuttX debug console |
| R4, T4 | UART4 RX and TX | GPS1 |
| R6, T6 | UART6 RX and TX | RC port |
| R7, T7 | UART7 RX and TX (RX is located in the plug for use with 4-in-1 ESCs) | DShot telemetry |
| LED | WS2182 addressable LED signal wire (not tested) | |
| Buz- | Piezo buzzer negative leg (Connect buzzer positive leg to 5V pad) | |
| 3V3 | 3.3V output (200 mA max) | |
| M1 to M4 | Motor signal outputs (located in plug for use in 4-in-1 ESCs) | |
| M5, M6 | Additional motor signal outputs (located on side of board) | |
| RSI | Analog RSSI (0-3.3V) input from receiver | |
| Boot | Bootloader button |
# PX4 Bootloader Update {#bootloader}
The board comes pre-installed with Betaflight. Before PX4 firmware can be installed, the PX4 bootloader must be flashed. Download the kakutef7_bl.hex bootloader binary and read this page for flashing instructions.
# Building Firmware
To build PX4 for this target:
make holybro_kakutef7_default
# Installing PX4 Firmware
The firmware can be installed in any of the normal ways:
- Build and upload the source
make holybro_kakutef7_default upload - Load the firmware using QGroundControl. You can use either pre-built firmware or your own custom firmware.
# Configuration
In addition to the basic configuration, the following parameters are important:
| Parameter | Setting |
|---|---|
| SYS_HAS_MAG | This should be disabled since the board does not have an internal mag. You can enable it if you attach an external mag. |
| MOT_ORDERING | If you use a 4-in-1 ESC with Betaflight/Cleanflight motor assignment, this parameter can be set accordingly. |
# Serial Port Mapping
| UART | Device | Port |
|---|---|---|
| USART1 | /dev/ttyS0 | TELEM1 |
| USART2 | /dev/ttyS1 | TELEM2 |
| USART3 | /dev/ttyS2 | Debug Console |
| UART4 | /dev/ttyS3 | GPS1 |
| USART6 | /dev/ttyS4 | RC SBUS |
| UART7 | /dev/ttyS5 | ESC telemetry (DShot) |
# Debug Port
# System Console
UART3 RX and TX are configured for use as the System Console.
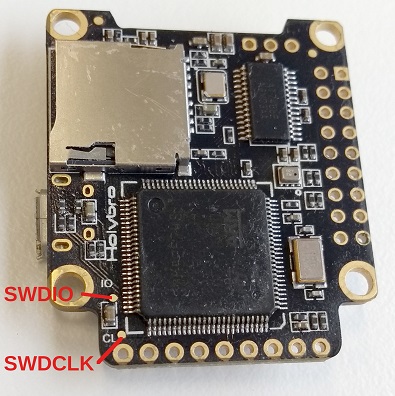
# SWD
The SWD interface (JTAG) pins are:
SWCLK: Test Point 2 (Pin 72 on the CPU)SWDIO: Test Point 3 (Pin 76 on CPU)GND: As marked on boardVDD_3V3: As marked on board
These are shown below.