# 遥控系统
如果你使用一个手持发射机 手动 控制你的飞机,那么你需要一个遥控系统(简称RC)。 这个章节解释了一些关于 RC 如何工作,如何为你的飞行器(车辆)悬着一个合适的无线电系统和怎么让它和你的飞控控制。
Tip PX4 在自动飞行模式可以不需要遥控器。 你可以在 参数设置 里禁用遥控检查:COM_RC_IN_MODE 设为 1。
# 遥控系统是如何工作的?
遥控系统有一个地基远程控制单元,需要操作员来命令飞行器。 遥控器通过物理控制来指定飞机的运动(例如,速度、方向、油门、偏航、俯仰和横滚等),也可以切换自驾仪的飞行模式(例如,起飞、着陆、返航、任务等)。 带有遥测功能的 遥控系统,远程控制单元也可以接收并显示飞机的信息(例如,电池电量、飞行模式)。

远程控制单元有一个可以和飞机上的无线电模块相互绑定、通信的无线电模块。 飞机上的单元连接到自驾仪上。 自驾仪根据当前飞机的飞行模式和飞机状态来发送命令,正确驱动电机和伺服器。
Note 地面和空中的无线模块也被称作“发射机”和“接收机”(即使它们支持双向通信),也被称作成对的发射机/接收机。 远程控制单元和它包含的无线模块也被称作“发射机”。
遥控系统的一个重要质量指标是它支持多少个通道。 通道的数量是由它可以发送指令到飞机的物理控制的数量决定。
一个飞行器最少支持4个通道(横滚、俯仰、偏航、油门)。 地面设备最少需要两个通道(转向和油门)。 8或16通道的遥控器可以提供额外的通道,用来控制其他机械结构或激活自驾仪上不同的飞行模式。
# 远程控制的类型
# 飞机的远程控制单元 {#transmitter_modes}
无人机最受欢迎的远程控制单元形式如下所示。 横滚/俯仰和油门/偏航的控制分别布置在摇杆上(飞行器最少需要4个通道)。
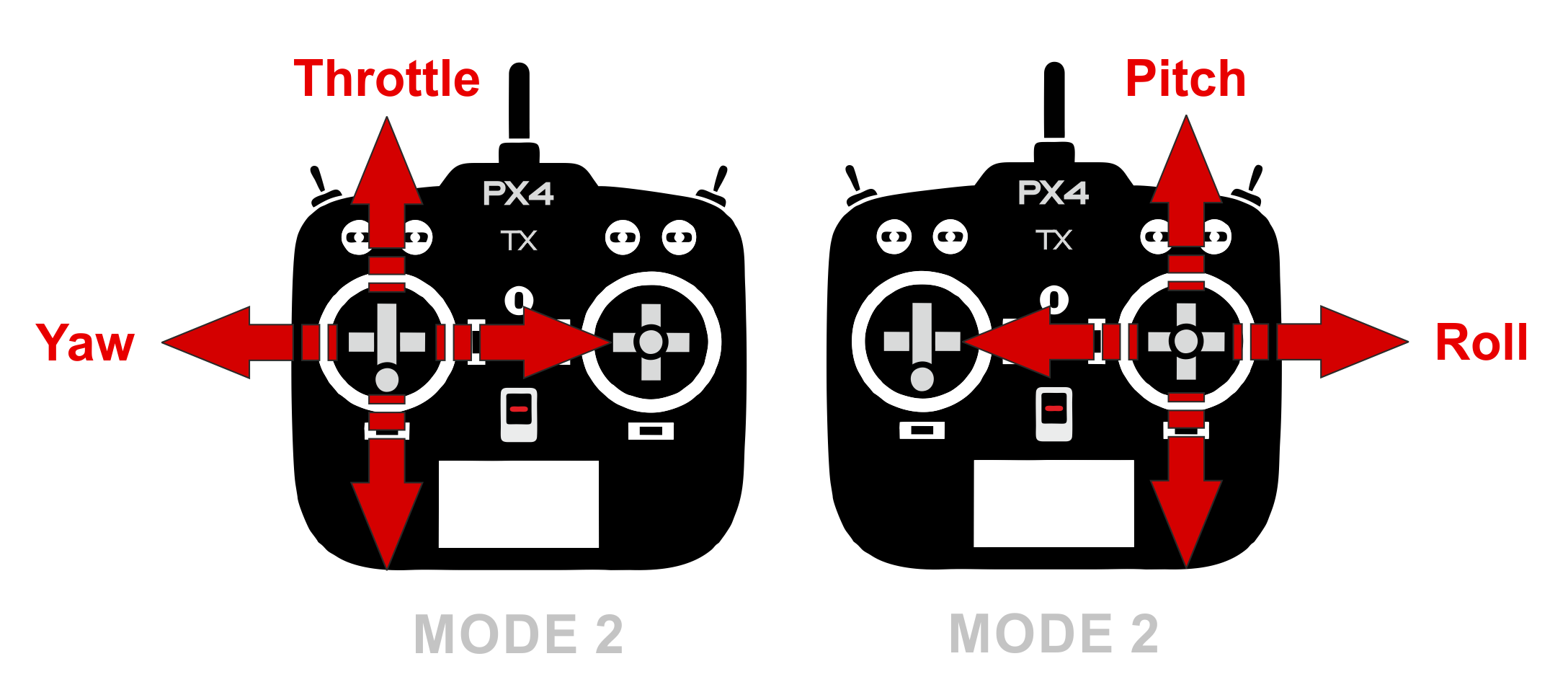
摇杆、开关等有许多可能的布局。 最常用的布局被给予了特定的“模式”号。 日本手和美国手只在油门的位置有差别。
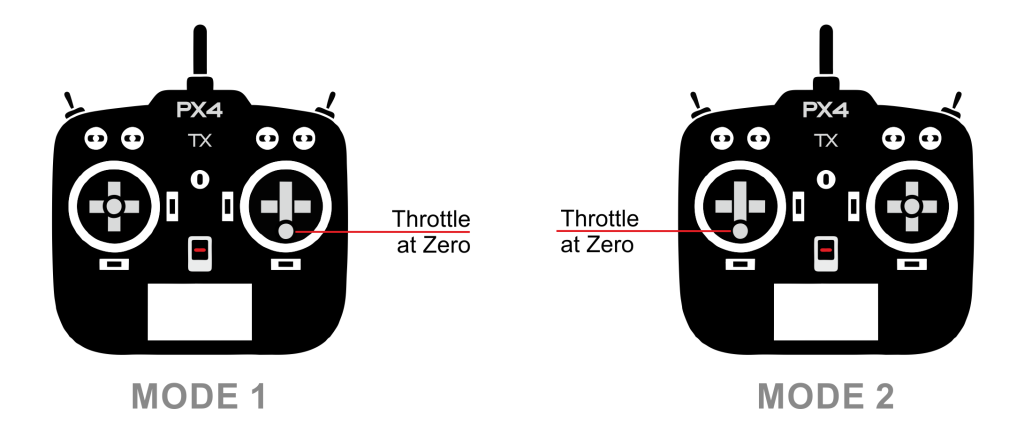
Note 选择什么模式看你的喜好( 美国手更受欢迎点)。
# 地面设备的远程控制单元
一个 UGV/车辆最少需要两个发射机通道来发送转向和速度指令。 常见的发射机使用一个滚轮和扳机、两个单自由度的摇杆、或一个双自由度的摇杆来发射这些指令。
当然你也可以使用更多的通道/控制机构,其他有趣的激励器和飞行模式也非常有用。
# 选择 RC 系统组件
你需要选择互相兼容的成对发射机/接收机。 另外,接收机必须兼容 PX4和飞行控制器硬件。
兼容的无线系统通常一起销售。 例如,FrSky Taranis X9D 和 FrSky X8R是一个受欢迎的选择。
# 成对的发射机/接收机
FrSky Taranis X9D是最受欢迎的 RC 单元之一。 它拥有内置的发射机模块和可以配对的FrSky X4R-SB((S-BUS,低延迟)或X4R(PPM-Sum,老式)外置接收机。 它还有一个可以自定义的无线发射机模块接口和自定义的 OpenTX 开源固件。
Note 使用 FrSky 的无线模块可以开启遥测功能。
其他受欢迎的成对发射机/接收机。
- Turnigy,例如,FrSky的发射机/接收机模块。
- Futaba 发射机和兼容 Futaba S-Bus 接收机。
- 远距离~900MHz,低延迟:“黑羊的Crossfire”或“Crossfire Micro”。(例如,Taranis)。
- 长距离 ~433MHz:ImmersionRC EzUHF(例如,Taranis)。
# PX4 兼容的接收机 {#compatible_receivers}
另外接收机和发射机需要兼容,接收机也必须和 PX4 和其他控制硬件兼容。
PX4 和 Pixhawk兼容的接收机如下所示:
- 所有的 Spektrum 和 DSM 无线接收机。
- 所有的 Futaba S.BUS 和 S.BUS2 接收机。
- 所有的 FrSky PPM 和 S.Bus 模块。
- Graupner HoTT。(一种新的2.4 g 无线通信技术,可以语音遥测和搭配大量传感器,可以进行4 km或100 mW 范围内的控制 )
- 所有其他制造商的 PPM 模块。
# 连接接收机
另外,接收机连接到飞控还需要合适的波特率。
- Spektrum 和 DSM 接收机使用** SPKT/DSM ** 接口连接。
- Graupner HoTT receivers: SUMD output must connect to a SPKT/DSM input.
- PPM-Sum and S.BUS receivers must connect directly to the RC ground, power and signal pins (typically labeled RC or RCIN)
- PPM receivers that have an individual wire for each channel must connect to the RCIN channel via a PPM encoder like this one (PPM-Sum receivers use a single signal wire for all channels).
特定遥控器的连接可以查阅下面提供的快速指南。
提示相关信息可以查阅遥控器制造商提供的说明书。
# 发射机/接收机对频 {#binding}
在你校准和/使用无线系统之前,你需要先将接收机和发射机对频,好让他们之间进行通信。 各种遥控器的对频方法各不相同(参照遥控器说明书)。
如果你使用* Spektrum *的接收机,你可以使用 QGroundControl 的遥控器设置 > 对频 进行对频.
# Set Signal-Loss Behaviour
RC receivers have different ways of indicating signal loss:
- Output nothing (automatically detected by PX4)
- Output a low throttle value value (you can configure PX4 to detect this).
- Output the last received signal (PX4 cannot handle this case!)
Choose a receiver that can emit nothing (preferred) when RC is lost, or a low throttle value. This behaviour may require hardware configuration of the receiver (check the manual).
For more information see Radio Control Setup > RC Loss Detection.
# Related Topics
- Radio Control Setup - Configuring your radio with PX4.
- Flying 101 - Learn how to fly with a remote control.