# 传感器
基于 PX4 的系统使用传感器来确定飞行器状态(自稳和启用自主控制所需)。 飞行器状态包括:位置/高度,航向,速度,空速,方向(姿态),不同方向的旋转速率,电池电量等。
系统 最低要求 陀螺仪,加速度计,磁力计(罗盘)和气压计。 需要 GPS 或其他定位系统来启用所有自动模式和一些辅助模式。 固定翼和 VTOL 飞行器还应包括空速传感器(特别推荐)。
最小的传感器组合集成在 Pixhawk 系列 飞控上(并且也能存在其他飞控平台上)。 附加/外部传感器可以连接到控制器。
下面我们介绍一些传感器。 最后有链接到关于 传感器接线 的信息。
# GPS&罗盘 {#gps_compass}
PX4 支持许多全球导航卫星系统(GNSS)接收器和罗盘(磁力计)。 它还支持 实时动态(RTK)GPS接收器 ,它将 GPS 系统扩展到厘米级精度。
Tip Pixhawk 系列 控制器包括 内置 罗盘。 这对于大型飞行器(例如 VTOL ) 可能 是有用的,其中可以通过远离电源线安装Pixhawk 来减少电磁干扰。 在小型飞行器上,几乎总是需要外置罗盘。
我们建议使用安装在尽可能远离 电机/电调 电源线的外部“组合” 罗盘 / GPS 模块 - 通常在支座或机翼(固定翼)上。
常见的 GPS/罗盘硬件选项列于:GPS/罗盘。

# 空速计
对于固定翼和 VTOL 机架,强烈建议 使用空速传感器。
它们非常重要,因为自驾仪没有其他方法来检测失速。 对于固定翼飞行来说,保证升力的是空速而不是地速。
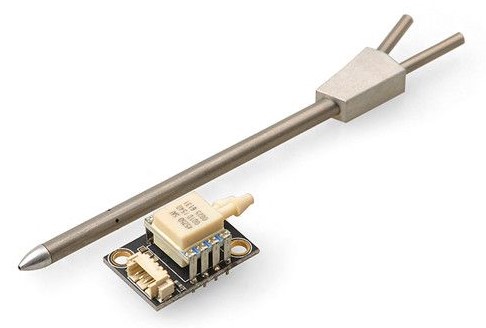
有关更多信息和推荐的硬件,请参阅:空速传感器。
# Tachometer
Tachometers (revolution-counter sensors) are highly recommended for rotor-wing frames because they allow the autopilot to detect stall or another rotor failure (for rotor-wing flight it is the rotation of blades that guarantees lift not airspeed or ground speed).

For more information and recommended hardware see: Sensors > Tachometers.
# Distance
Distance sensors are used for precision landing, object avoidance and terrain following.
PX4 supports many affordable distance sensors, using different technologies, and supporting different ranges and features. For more information see: Distance Sensors.

# Optical Flow
PX4Flow is an optical flow smart camera that can track motion, and has as integrated sonar sensor. PX4 blends the sensor output with information from other position sources (e.g. GPS) to provide a more accurate position lock. This sensor can be used indoors, when no GPS signal is available.
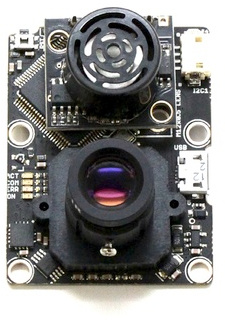
Some options include:
- 3DR PX4Flow 智能相机(光流传感器)
- HK Pilot32 带声呐的光流套件 (好盈) - 软件兼容, 但接口不兼容。
# Sensor Wiring {#wiring}
Sensor wiring information is usually provided in manufacturer documentation for flight controllers and the sensors themselves.
In addition, see: