# ModalAI Flight Core v1
The ModalAI Flight Core v1 is a flight controller for PX4, made in the USA. The Flight Core can be paired with ModalAI VOXL for obstacle avoidance and GPS-denied navigation, or used independently as a standalone flight controller.
Note This flight controller is manufacturer supported.
# Specification
| Feature | Details |
|---|---|
| Weight | 6 g |
| MCU | 216MHz, 32-bit ARM M7 STM32F765II |
| Memory | 256Kb FRAM |
| 2Mbit Flash | |
| 512Kbit SRAM | |
| Firmware | PX4 |
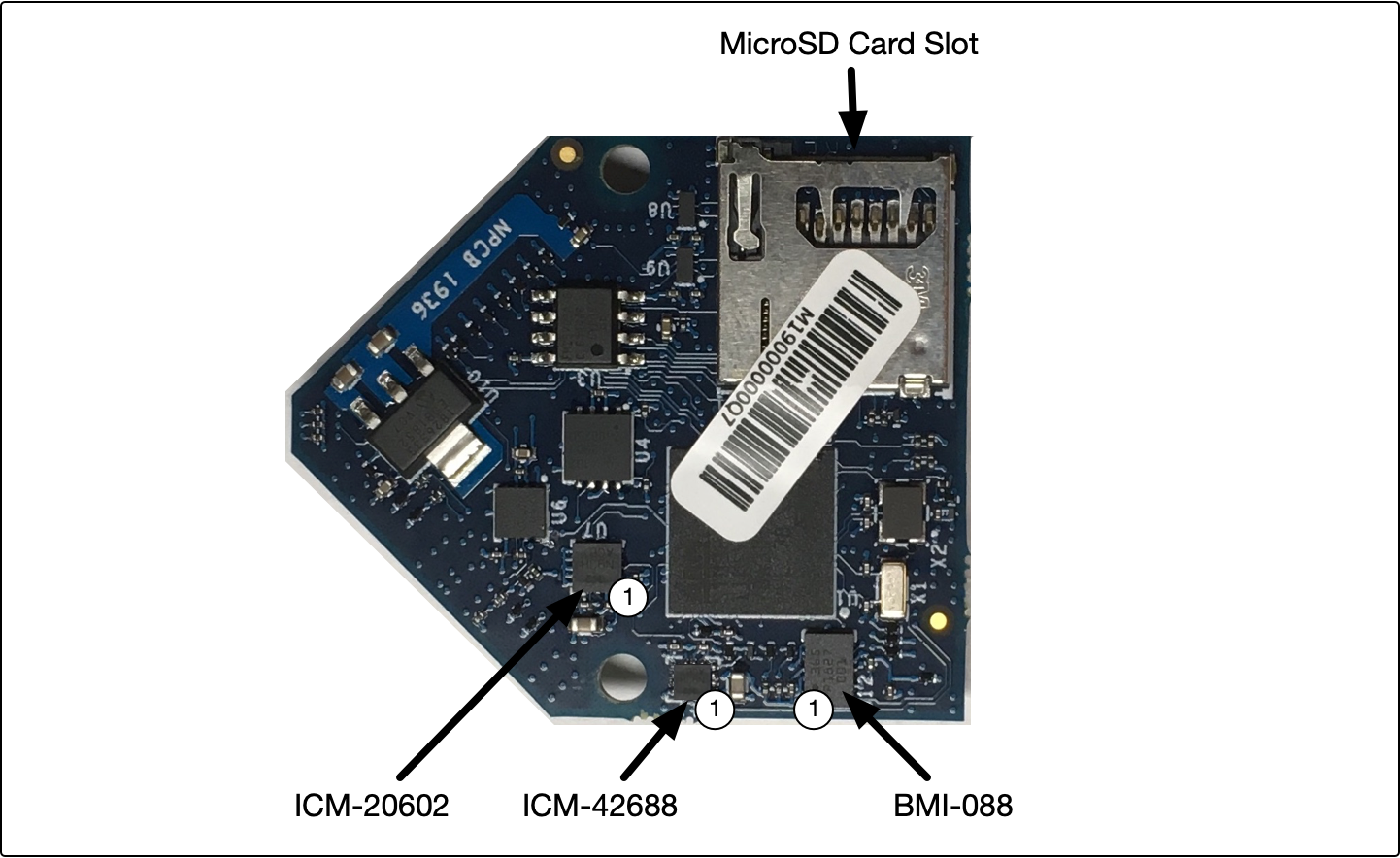
| IMUs | ICM-20602 (SPI1) |
| ICM-42688 (SPI2) | |
| BMI088 (SPI6) | |
| Barometer | BMP388 (I2C4) |
| Secure Element | A71CH (I2C4) |
| microSD Card | Information on supported cards |
| Inputs | GPS/Mag |
| Spektrum | |
| Telemetry | |
| CAN bus | |
| PPM | |
| Outputs | 6 LEDs (2xRGB) |
| 8 PWM Channels | |
| Extra Interfaces | 3 serial ports |
| I2C | |
| GPIO |
Note More detailed hardware documentation can be found here.
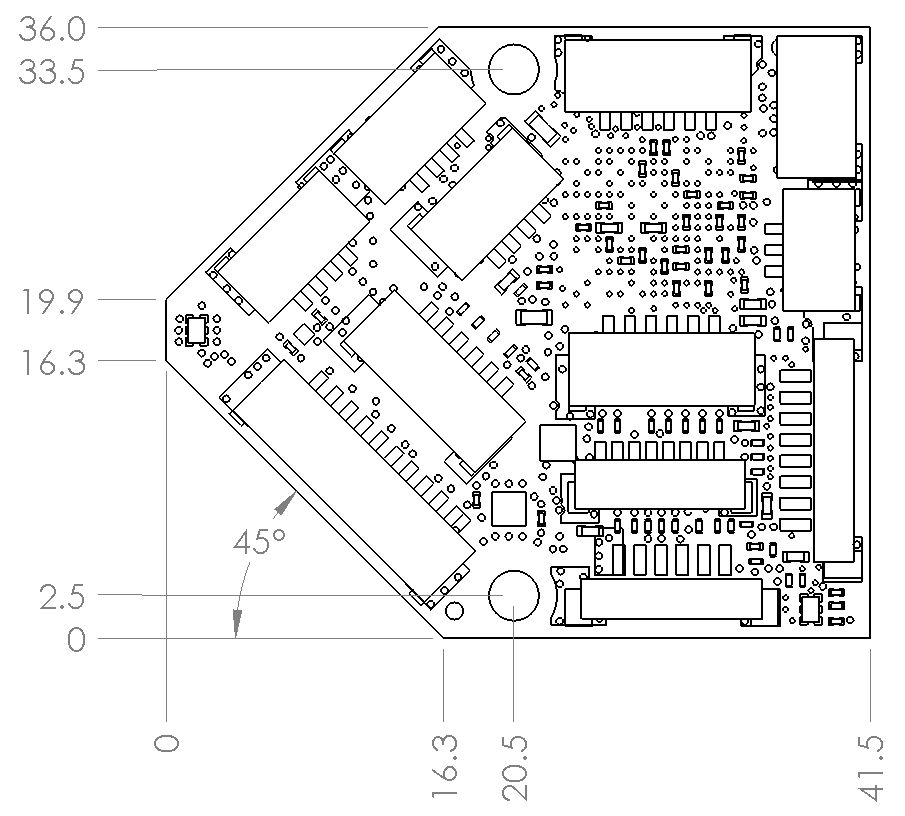
# Dimensions
# PX4 Firwmare Compatibility
Flight Core v1 is fully compatible with the official PX4 Firmware from PX4 v1.11.
ModalAI maintains a branched PX4 version for PX4 v1.10. This includes improvements in VIO and VOA that are planned to be upstreamed.
More information about the firmware can be found here.
# QGroundControl Support
This board supported in QGroundControl 4.0 and later.
# Availability
- Flight Core Complete Kit is available here
- Flight Core Board Only is available here
- Flight Core assembled with VOXL and cameras is available at here
# Quick Start
# Orientation
The diagram below shows the recommended orientation, which corresponds to ROTATION_NONE starting with PX4 v1.11 (and on the ModalAI-maintained PX4 v1.10 branch)
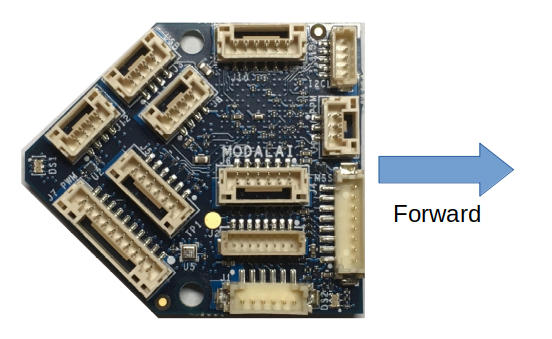
Warning For PX4 v1.10 stable releases from QGroundControl use
ROTATION_YAW_180for the above orientation.
# Connectors
Detailed information about the pinouts can be found here.
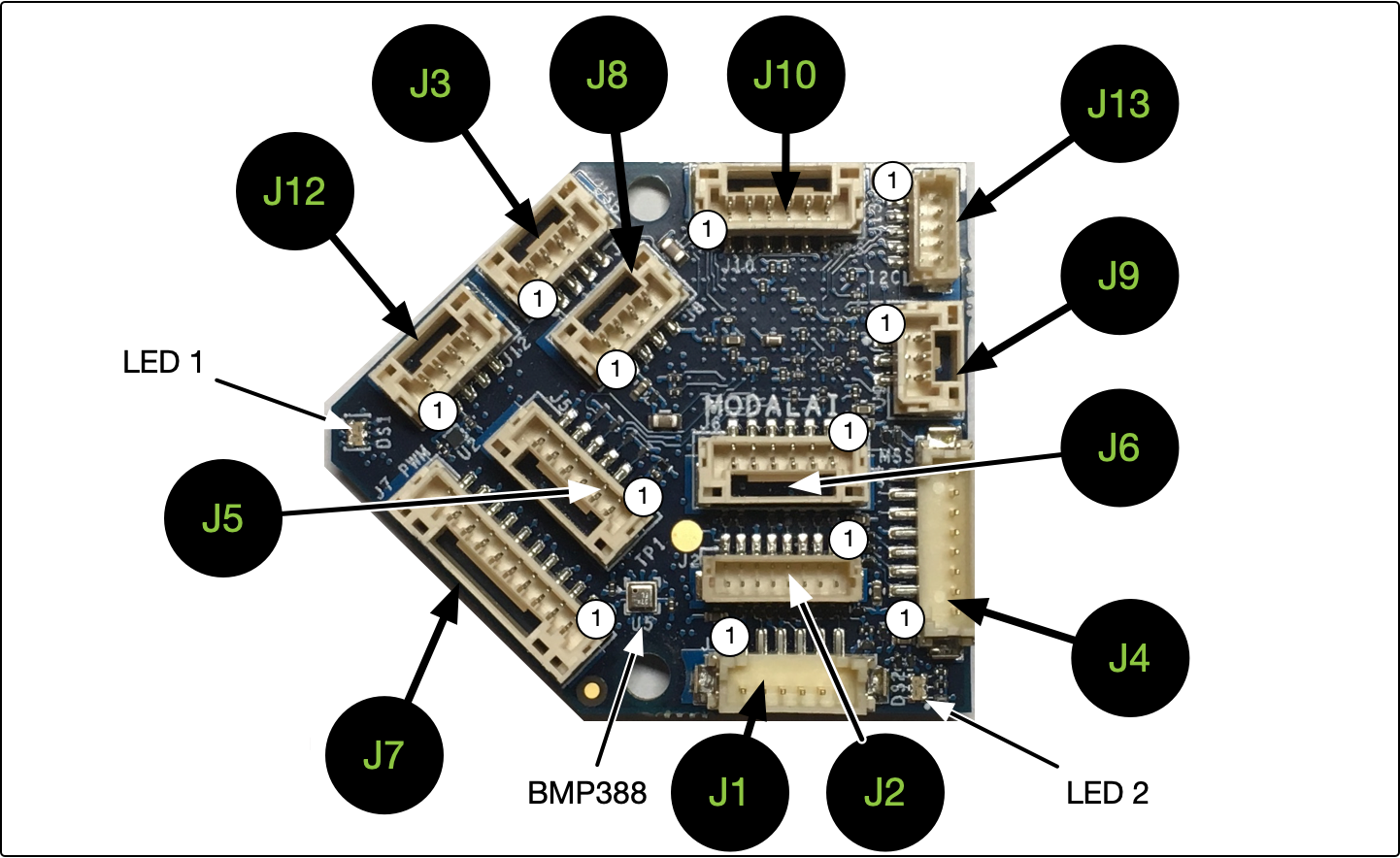
| Connector | Summary |
|---|---|
| J1 | VOXL Communications Interface Connector (TELEM2) |
| J2 | Programming and Debug Connector |
| J3 | USB Connector |
| J4 | VOXL Spare Communications Interface Connector (TELEM3) |
| J5 | Telemetry Connector (TELEM1) |
| J6 | VOXL-Power Management Input / Expansion |
| J7 | 8-Channel PWM Output Connector |
| J8 | CAN Bus Connector |
| J9 | PPM RC In |
| J10 | External GPS & Magnetometer Connector |
| J12 | RC input |
| J13 | I2C Display (Spare Sensor Connector) / Safety Button Input |
# User Guide
The full user guide is available here.
# How to Build
To build PX4 for this target:
make modalai_fc-v1
# Serial Port Mapping
| UART | Device | Port |
|---|---|---|
| USART1 | /dev/ttyS0 | GPS1 (J10) |
| USART2 | /dev/ttyS1 | TELEM3 (J4) |
| USART3 | /dev/ttyS2 | Debug Console (J2) |
| UART4 | /dev/ttyS3 | Expansion UART (J6) |
| UART5 | /dev/ttyS4 | TELEM2, Primary VOXL Communications (J1) |
| USART6 | /dev/ttyS5 | RC (J12) |
| UART7 | /dev/ttyS6 | TELEM1 (J5) |
| UART8 | /dev/ttyS7 | N/A |
# Support
Please visit http://support.modalai.com/ for more information.