# Hex Cube Black Flight Controller
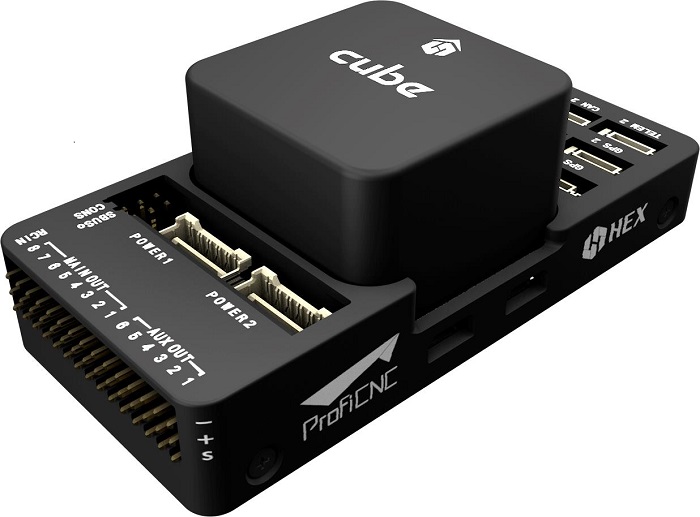
The Hex Cube Black flight controller (previously known as Pixhawk 2.1) is a flexible autopilot intended primarily for manufacturers of commercial systems. It is based on the Pixhawk-project FMUv3 open hardware design and runs PX4 on the NuttX OS.
Tip The manufacturer Cube Docs contain detailed information, including an overview of the Differences between Cube Colours.
The controller is designed to be used with a domain-specific carrier board in order to reduce the wiring, improve reliability, and ease of assembly. For example, a carrier board for a commercial inspection vehicle might include connections for a companion computer, while a carrier board for a racer could includes ESCs form the frame of the vehicle.
Cube includes vibration isolation on two of the IMU's, with a third fixed IMU as a reference / Backup.
Tip This autopilot is supported by the PX4 maintenance and test teams.
# Key Features
- 32bit STM32F427 Cortex-M4F® core with FPU
- 168 MHz / 252 MIPS
- 256 KB RAM
- 2 MB Flash (fully accessible)
- 32 bit STM32F103 failsafe co-processor
- 14 PWM / Servo outputs (8 with failsafe and manual override, 6 auxiliary, high-power compatible)
- Abundant connectivity options for additional peripherals (UART, I2C, CAN)
- Integrated backup system for in-flight recovery and manual override with dedicated processor and stand-alone power supply (fixed-wing use)
- Backup system integrates mixing, providing consistent autopilot and manual override mixing modes (fixed wing use)
- Redundant power supply inputs and automatic failover
- External safety switch
- Multicolor LED main visual indicator
- High-power, multi-tone piezo audio indicator
- microSD card for high-rate logging over extended periods of time
# Where to Buy {#stores}
Cube Black (ProfiCNC)
# Assembly
# Specifications
# Processor
- 32bit STM32F427 Cortex M4 core with FPU
- 168 MHz / 252 MIPS
- 256 KB RAM
- 2 MB Flash (fully accessible)
- 32 bit STM32F103 failsafe co-processor
# Sensors
- TBA
# Interfaces
- 5x UART (serial ports), one high-power capable, 2x with HW flow control
- 2x CAN (one with internal 3.3V transceiver, one on expansion connector)
- Spektrum DSM / DSM2 / DSM-X® Satellite compatible input
- Futaba S.BUS® compatible input and output
- PPM sum signal input
- RSSI (PWM or voltage) input
- I2C
- SPI
- 3.3v ADC input
- Internal microUSB port and external microUSB port extension
# Power System and Protection
- Ideal diode controller with automatic failover
- Servo rail high-power (max. 10V) and high-current (10A+) ready
- All peripheral outputs over-current protected, all inputs ESD protected
# Voltage Ratings
Pixhawk can be triple-redundant on the power supply if three power sources are supplied. The three rails are: Power module input, servo rail input, USB input.
# Normal Operation Maximum Ratings
Under these conditions all power sources will be used in this order to power the system
- Power module input (4.8V to 5.4V)
- Servo rail input (4.8V to 5.4V) UP TO 10V FOR MANUAL OVERRIDE, BUT AUTOPILOT PART WILL BE UNPOWERED ABOVE 5.7V IF POWER MODULE INPUT IS NOT PRESENT
- USB power input (4.8V to 5.4V)
# Absolute Maximum Ratings
Under these conditions the system will not draw any power (will not be operational), but will remain intact.
- Power module input (4.1V to 5.7V, 0V to 20V undamaged)
- Servo rail input (4.1V to 5.7V, 0V to 20V)
- USB power input (4.1V to 5.7V, 0V to 6V)
# Pinouts and Schematics
Board schematics and other documentation can be found here: The Cube Project.
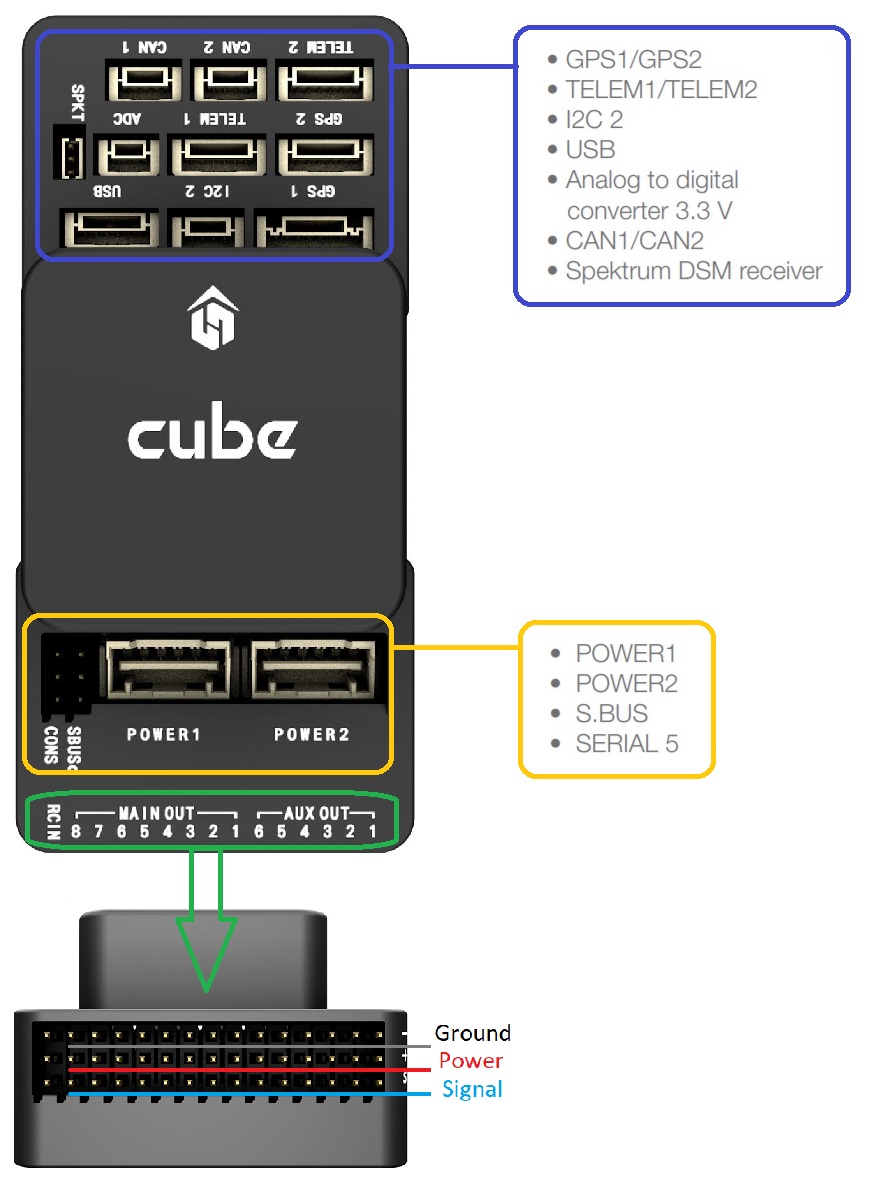
# Ports
# Top-Side (GPS, TELEM etc)
# Serial Port Mapping {#serial_ports}
| UART | Device | Port |
|---|---|---|
| USART1 | /dev/ttyS0 | |
| USART2 | /dev/ttyS1 | TELEM1 (flow control) |
| USART3 | /dev/ttyS2 | TELEM2 (flow control) |
| UART4 | /dev/ttyS3 | GPS1 |
| USART6 | /dev/ttyS4 | PX4IO |
| UART7 | /dev/ttyS5 | CONSOLE |
| UART8 | /dev/ttyS6 |
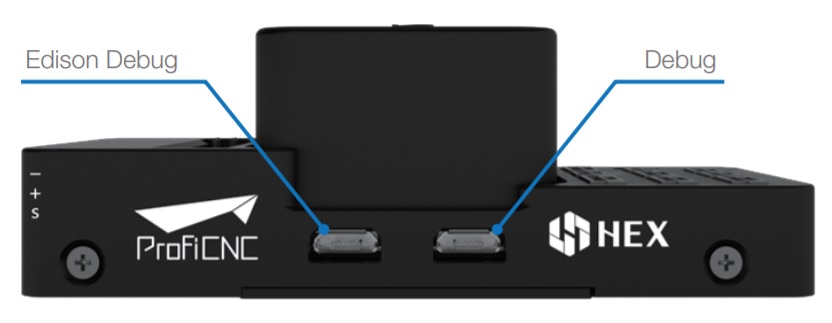
# Debug Ports
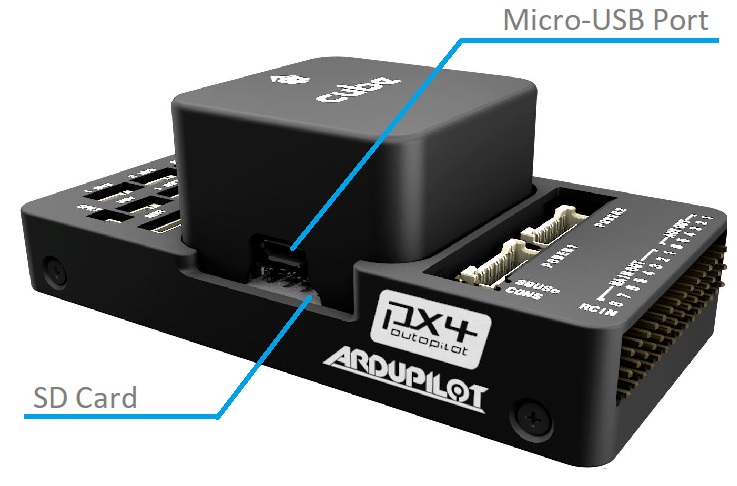
# USB/SDCard Ports
# Building Firmware
Tip Most users will not need to build this firmware! It is pre-built and automatically installed by QGroundControl when appropriate hardware is connected.
To build PX4 for this target:
make px4_fmu-v3_default
# Issues
CAN1 and CAN2 silk screen on the Cube Black are flipped (CAN1 is CAN2 and vice versa).
# Further Information/Documentation
- Cube Wiring Quickstart
- Cube Docs (Manufacturer):