# AUAV-X2 Autopilot (Discontinued)
Warning This flight controller has been discontinued and is no longer commercially available.
The AUAV® AUAV-X2 autopilot is based on the Pixhawk®-project FMUv2 open hardware design. It runs PX4 on the NuttX OS.
# Quick Summary
- Main System-on-Chip: STM32F427
- CPU: STM32F427VIT6 ARM microcontroller - Revision 3
- IO: STM32F100C8T6 ARM microcontroller
- Sensors:
- Invensense MPU9250 9DOF
- Invensense ICM-20608 6DOF
- MEAS MS5611 barometer
- Dimensions/Weight
- Size: 36mm x 50mm
- Mounting Points: 30.5mm x 30.5mm 3.2mm diameter
- Weight: 10.9g
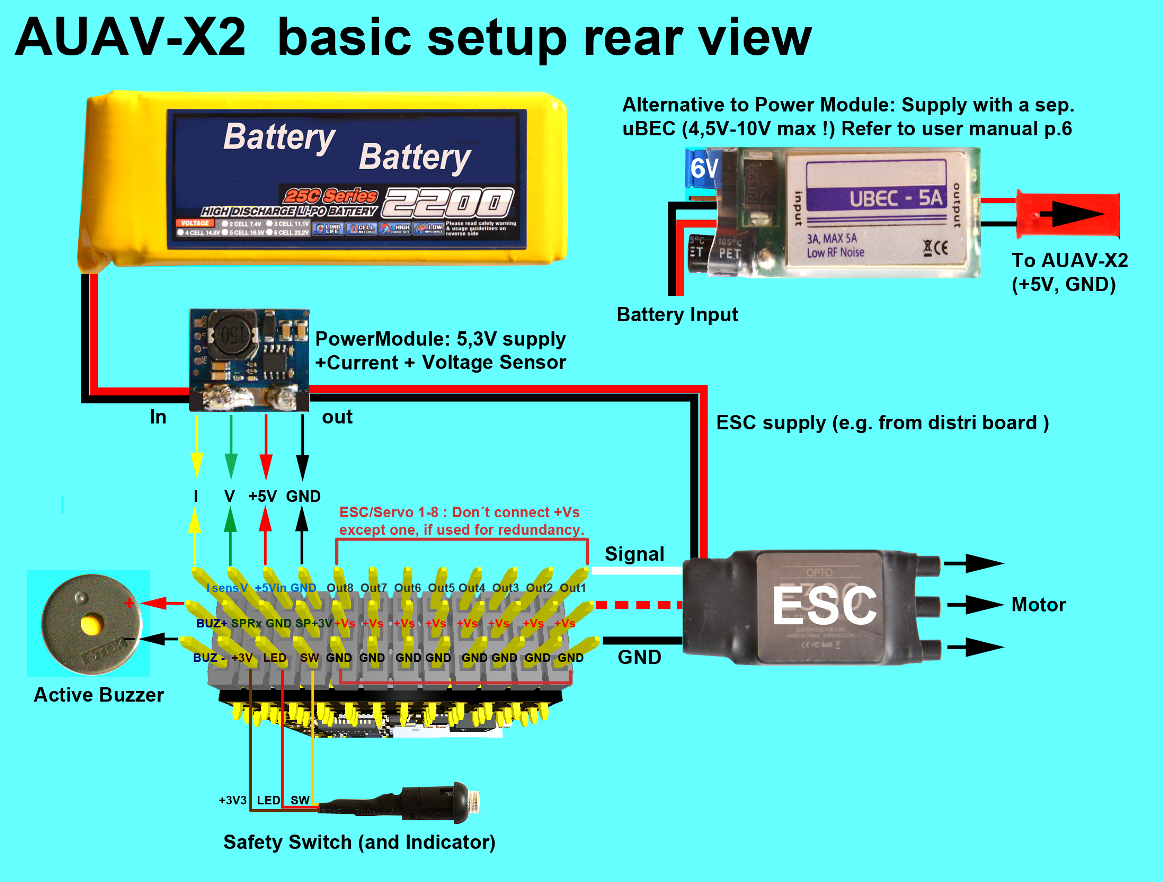
- Power OR-ing schematic with reverse voltage protection. 5V power module is required!
# Connectivity
- 2.54mm headers:
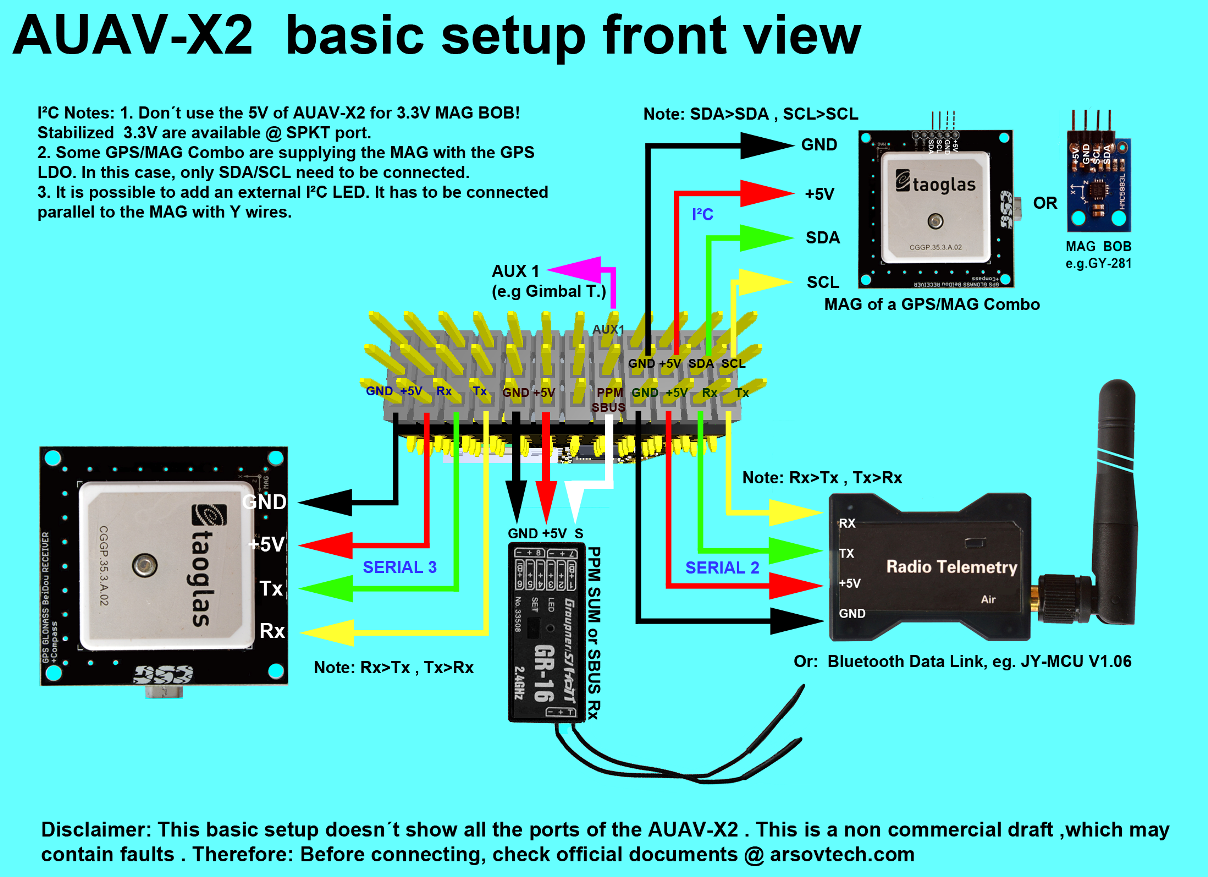
- GPS (USART4)
- i2c
- RC input
- PPM input
- Spektrum input
- RSSI input
- sBus input
- sBus output
- Power input
- Buzzer output
- LED output
- 8 x Servo outputs
- 6 x Aux outputs
- USART7 (Console)
- USART8 (OSD)
# Availability
No longer in production. This has been superceded by the mRo X2.1. mRobotics is the distributor for the AUAV Products from August 2017.
# Key Links
# Wiring Guide
# Schematics
The board is based on the Pixhawk project FMUv2 open hardware design.
- FMUv2 + IOv2 schematic -- Schematic and layout
Note As a CC-BY-SA 3.0 licensed Open Hardware design, all schematics and design files are available.
# Serial Port Mapping
| UART | Device | Port |
|---|---|---|
| UART1 | /dev/ttyS0 | IO debug |
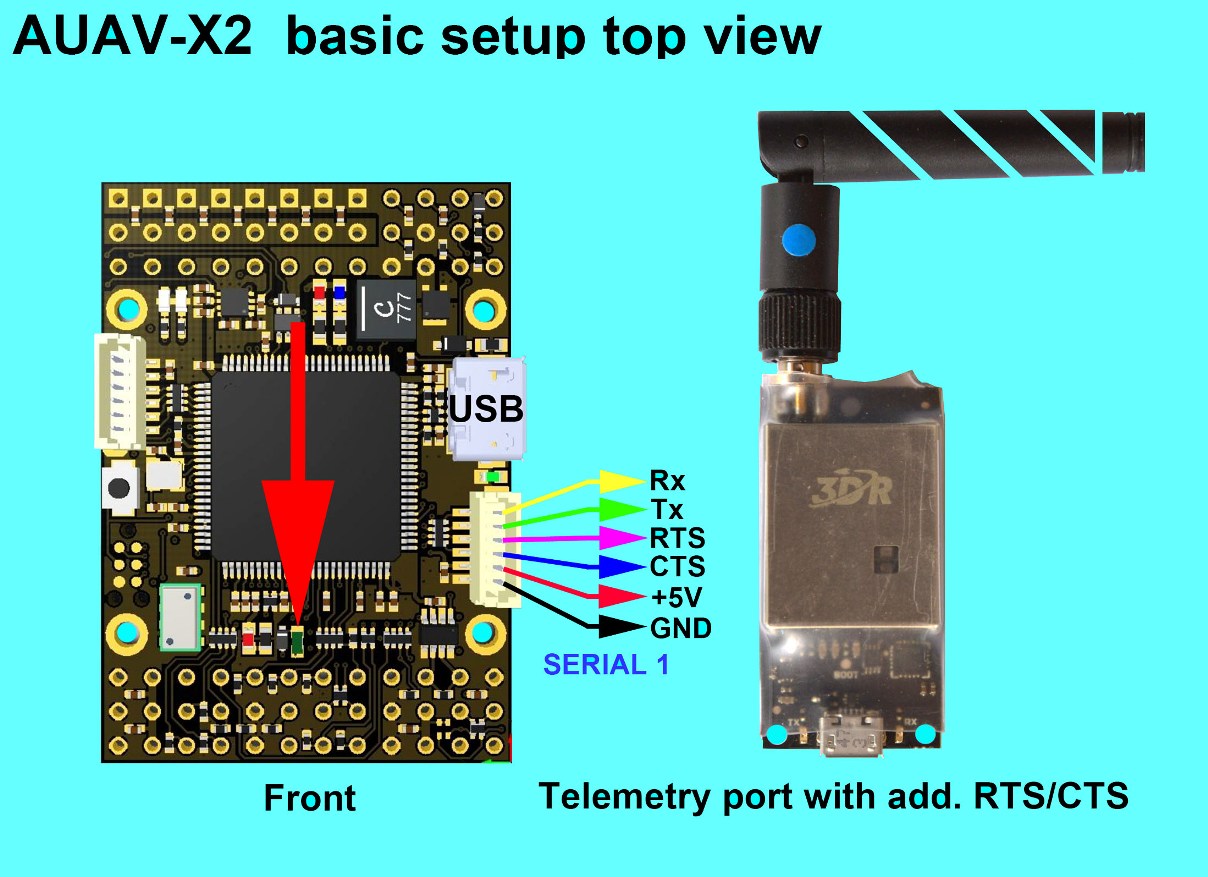
| USART2 | /dev/ttyS1 | TELEM1 (flow control) |
| USART3 | /dev/ttyS2 | TELEM2 (flow control) |
| UART4 | ||
| UART7 | CONSOLE | |
| UART8 | SERIAL4 |