# Missions
# Planning Missions
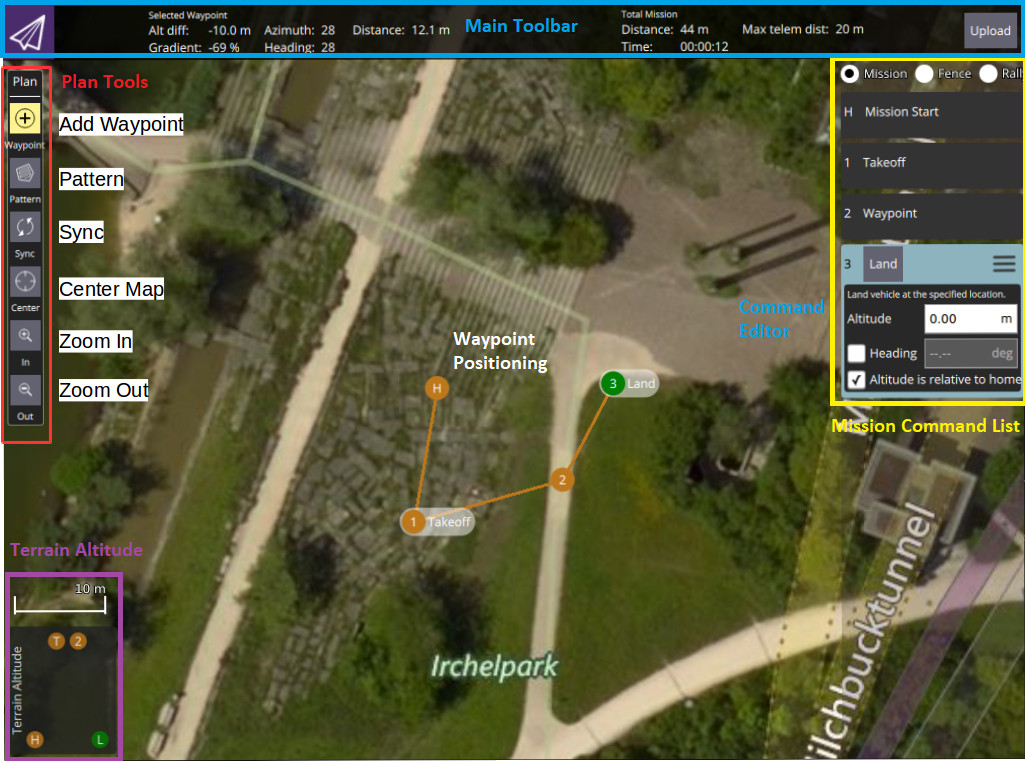
Manually planning missions is straightforward:
- Switch to the mission view
- Select the Add Waypoint ("plus") icon in the top left.
- Click on the map to add waypoints.
- Use the waypoint list on the right to modify the waypoint parameters/type The altitude indicator on the bottom provides a sense of the relative altitude of each waypoint.
- Once finished, click on the Upload button (top right) to send the mission to the vehicle.
You can also use the Pattern tool to automate creation of survey grids.
Tip For more information see the QGroundControl User Guide.
# Setting Vehicle Yaw
If set, a multi-rotor vehicle will yaw to face the Heading value specified in the target waypoint (corresponding to MAV_CMD_NAV_WAYPOINT.param4).
If Heading has not been explicitly set for the target waypoint (param4=NaN) then the vehicle will yaw towards a location specified in the parameter MPC_YAW_MODE.
By default this is the next waypoint.
Vehicle types that cannot independently control yaw and direction of travel will ignore yaw settings (e.g. Fixed Wing).
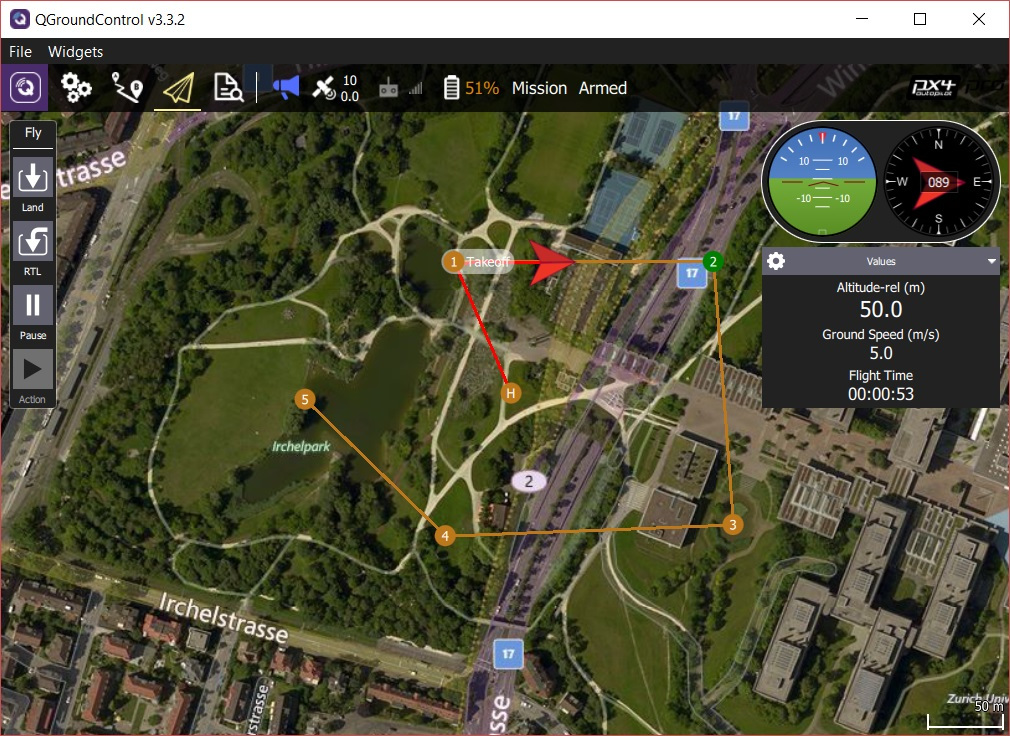
# Flying Missions
Once the mission is uploaded, switch to the flight view. The mission is displayed in a way that makes it easy to track progress (it cannot be modified in this view).