GPS와 나침반
PX4는 u-blox, MTK Ashtech 또는 Emlid 프로토콜이나 UAVCAN 통신 수신기를 사용하여 글로벌 내비게이션 위성시스템(GNSS)(GPS, GLONASS, Galileo, BeiDou, QZSS 및 SBAS 포함)을 지원합니다. A GNSS system is needed for missions, and some other automatic and manual/assisted modes.
PX4는 Bosch BMM 150 MEMS (I2C 버스를 통해), HMC5883/HMC5983 (I2C 또는 SPI), IST8310 (I2C) 및 LIS3MDL (I2C 또는 SPI)과 같은 나침반 부품(자기계)과 함께 사용할 수 있습니다. 최대 4 개의 내외부 자력계를 연결할 수 있지만, 실제로는 하나만 헤딩 소스로 사용됩니다.

:::note PX4 also supports Real Time Kinematic (RTK) and Post-Processing Kinematic (PPK) GNSS Receivers, which extend GNSS systems to centimetre-level precision. :::
지원되는 GNSS와 나침반
PX4는 u-blox, MTK Ashtech 또는 Emlid 프로토콜 또는 UAVCAN 통신 장치에서 작동합니다.
This table contains non-RTK GNSS units (most of which also have a compass). These have been tested by the PX4 dev team, or which are popular within the PX4 community.
| 장치 | GPS | 나침반 | Notes |
|---|---|---|---|
| ARK GPS | M9N | ICM42688p | |
| Avionics Anonymous UAVCAN GNSS/Mag | SAM-M8Q | MMC5983MA | |
| CUAV NEO 3 GPS | M9N | IST8310 | |
| CUAV NEO 3 Pro GPS | M9N | RM3100 | |
| CUAV NEO 3X GPS | M9N | RM3100 | |
| CubePilot Here2 GNSS GPS (M8N) | M8N | ICM20948 | |
| Drotek DP0804 | M9N | LIS3MDL | Also see other Drotek u-blox GPS/Compasses |
| Emlid Reach M+ | ✓ | ✗ | Supports PPK. RTK expected. |
| Holybro DroneCAN M8N GPS | M8N | BMM150 | |
| Holybro Micro M8N GPS | M8N | IST8310 | |
| Holybro Nano Ublox M8 5883 GPS | UBX-M8030 | QMC5883 | |
| Holybro M8N GPS | M8N | IST8310 | |
| Holybro M9N GPS | M9N | IST8310 | |
| Holybro DroneCAN M9N GPS | M9N | BMM150 | |
| Hobbyking u-blox Neo-M8N GPS with Compass | M8N | ✓ | |
| LOCOSYS Hawk A1 GNSS receiver | MC-1612-V2b | optional | |
| LOCOSYS Hawk R1 | MC-1612-V2b | ||
| LOCOSYS Hawk R2 | MC-1612-V2b | IST8310 | |
| mRo GPS u-blox Neo-M8N Dual Compass | M8N | LIS3MDL, IST8308 | |
| Sky-Drones SmartAP GPS | M8N | HMC5983, IST8310, LIS3MDL | |
| Zubax GNSS 2 | MAX-M8Q | LIS3MDL |
Notes:
- ✓ 또는 특정 부품 번호는 기능이 지원되는 것을 나타내며, ✗ 또는 비어 있으면 해당 기능이 지원되지 않는 것을 나타냅니다. "?"는 "알 수 없음"을 나타냅니다.
- 가능하고 관련성이있는 경우 부품 이름이 사용됩니다 (예 : GPS 열의 ✓ GPS 모듈이 있지만 부품을 알 수 없음을 나타냄).
- 일부 단종품은 목록에서 생략될 수 있습니다. The original Here has already been removed. 단종된 모듈이 여기에 언급되지 않은 경우에는 이전 버전에서 확인하십시오.
Mounting the GNSS/Compass
Mounting the Compass explains how to mount a GNSS module that has a compass (it is the compass part that is affected by electromagnetic radiation).
하드웨어 설정
GPS(및 나침반 있는 경우) 연결 방법은 일반적으로 제조업체에서 제공합니다 (일반적인 Autopilot 하드웨어의 경우).
Pixhawk 시리즈 컨트롤러에는 GPS 연결용으로 표시된 포트가 있으며, 나침반은 I2C 또는 SPI 포트/버스(장치에 따라 다름)에 연결됩니다.
The ARK GPS, ARK RTK GPS, Zubax GNSS 2, CUAV C-RTK2, CubePilot Here3 CAN GNSS GPS (M8N), and Avionics Anonymous GNSS/Mag can also be connected via DroneCAN.
WARNING
GPS 모듈을 연결시 핀배열에 주의하십시오. 모두 소프트웨어와 호환되지만, 핀 순서를 주의하여 연결하여야 합니다.
GNSS 설정
"표준" GPS 설정은 다음과 같습니다. 추가 장치 설정은 PX4 또는 제조업체 장치설명서에서 제공될 수 있습니다 (예 : Trimble MB-Two > 설정).
PX4의 GPS 프로토콜은 기본적으로 u-blox로 설정됩니다. 기본적으로 Trimble, Emlid, MTK와 같은 다른 GPS 유형은 자동으로 감지되지 않습니다. 프로토콜은 GPS_x_PROTOCOL에서 설정 가능합니다.
메인 GPS 구성
Pixhawk의 GPS 설정은 투명하게 처리됩니다. GPS 모듈을 GPS라고 표시된 포트에 연결하기 만하면 작동합니다.
:::note 기본적인 직렬 포트 설정은 대부분의 장치에서 작동합니다. If you are using the Trimble MB-Two you will need to modify the configuration to explicitly set the rate to 115200 baud. :::
보조 GPS 설정(듀얼 GPS 시스템)
보조 GPS를 사용하려면, 포트에 연결후 직렬 포트 설정을 수행하여 GPS_2_CONFIG를 선택 포트를 할당합니다.
The following steps show how to configure a secondary GPS on the TELEM 2 port in QGroundControl:
- 찾기 및 설정 매개 변수 GPS_2_CONFIG에서 TELEM 2까지.
- QGroundControl에서 기체 설정 > 매개변수 섹션으로 이동합니다.
- GPS 탭 (1)을 선택한 다음 GPS_2_CONFIG 매개변수 (2)를 열고 드롭 다운 목록 (3)에서 TELEM 2를 선택합니다.
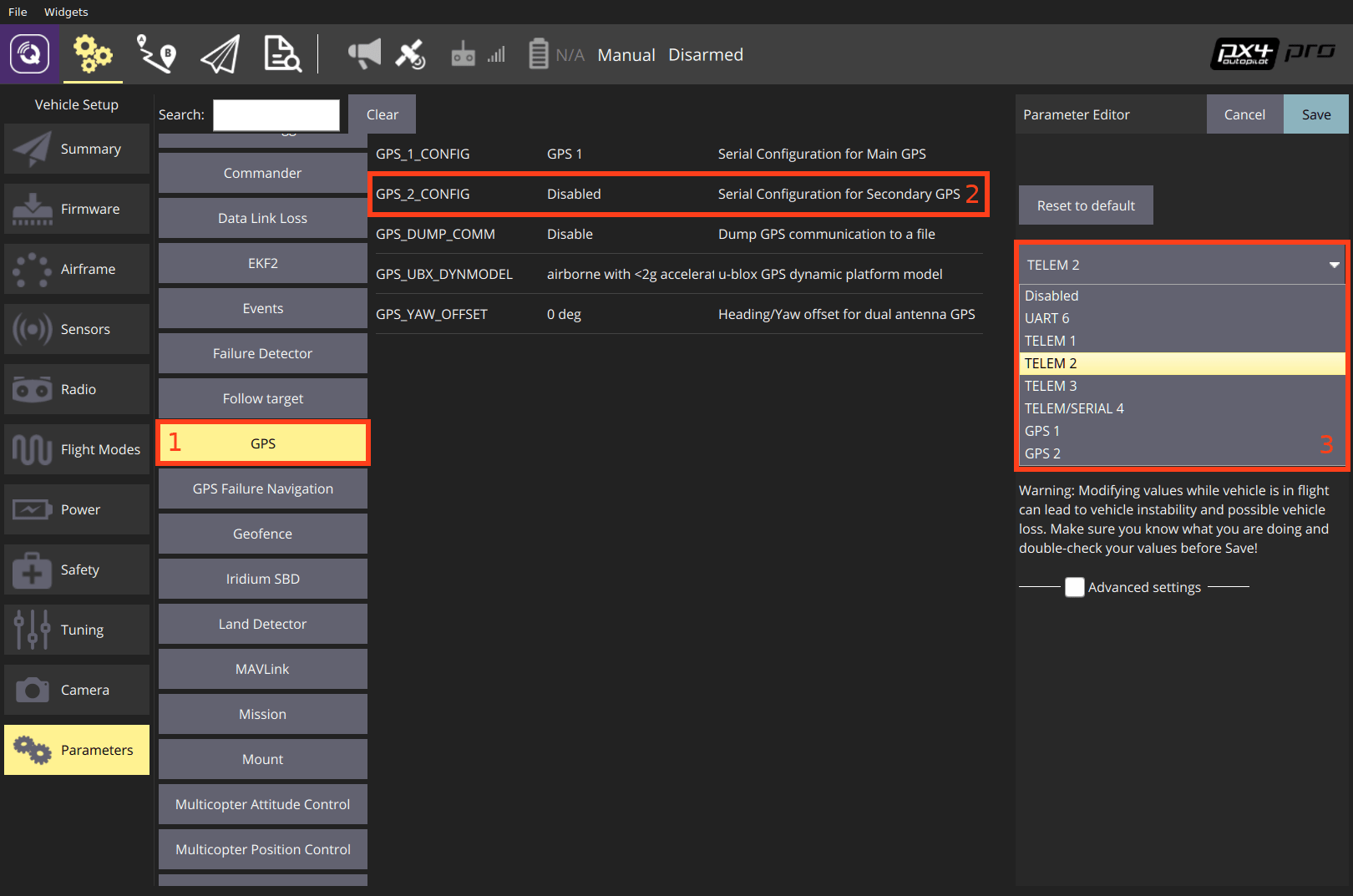
- 다른 매개변수를 표시하려면 기체를 재부팅하십시오.
- Serial 탭을 선택하고 SER_TEL2_BAUD 매개변수 (
TELEM 2포트 전송 속도)를 열어서 Auto로 설정합니다.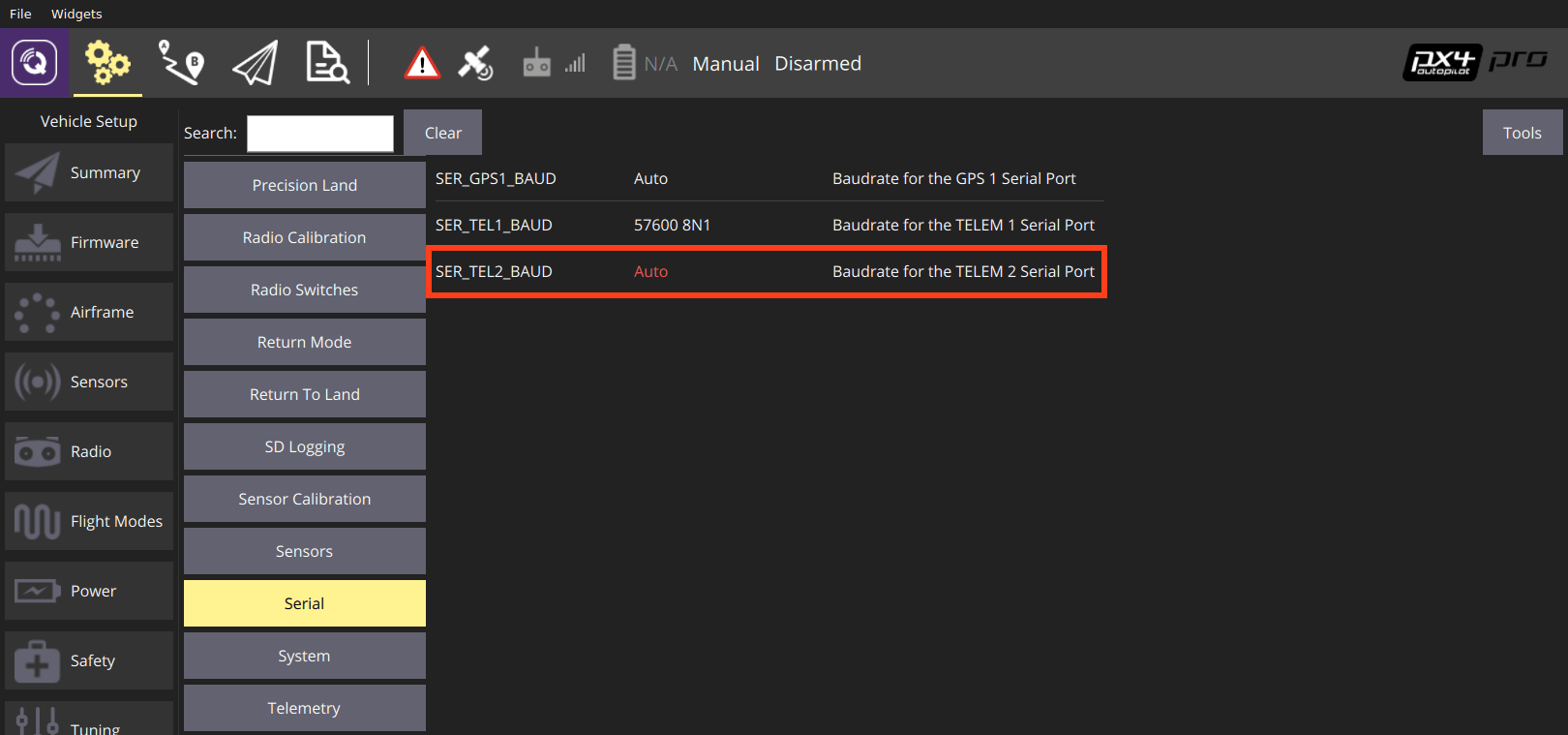
보조 GPS 포트를 설정 후 :
- 두 GPS 시스템의 데이터를 혼합하도록 ECL/EKF2 추정기를 설정합니다. 자세한 지침은 ECL EKF 사용 > 이중 수신기를 참고하십시오.
GPS를 Yaw/Heading 소스로 설정
GPS can be used as a source for yaw fusion when using modules where yaw output is supported by the device. This is documented in RTK GPS > Configuring GPS as Yaw/Heading Source.
나침반 설정
Compass calibration for an included compass part is covered in: Compass Configuration.
개발자 정보
- GPS/RTK-GPS
- 나침반
- 드라이버 소스 코드 (나침반)