GPS та компас
PX4 підтримує глобальні навігаційні супутникові системи (GNSS) (включаючи GPS, ГЛОНАСС, Galileo, BeiDou, QZSS і SBAS) за допомогою приймачів, які підтримують зв'язок через протоколи u-blox, MTK Ashtech або Emlid, або через UAVCAN. Він також підтримує Real Time Kinematic (RTK) і Post-Processing Kinematic (PPK) GPS-приймачі, які розширюють можливості GPS-систем до сантиметрової точності.
PX4 можна використовувати з наступними частинами компаса (магнітометрами): Bosch BMM 150 MEMS (через шину I2C), HMC5883 / HMC5983 (I2C або SPI), IST8310 (I2C) і LIS3MDL (I2C або SPI). Можна підключити до 4 внутрішніх або зовнішніх магнітометрів, хоча тільки один з них буде використовуватися як джерело курсу.

:::note PX4 also supports Real Time Kinematic (RTK) and Post-Processing Kinematic (PPK) GNSS Receivers, which extend GNSS systems to centimetre-level precision. :::
Підтримка GNSS та/або компаса
PX4 повинен працювати з будь-яким пристроєм, що підтримує зв'язок через протоколи u-blox, MTK Ashtech або Emlid, або через UAVCAN.
This table contains non-RTK GNSS units (most of which also have a compass). Вони були протестовані командою розробників PX4 або користуються популярністю у спільноті PX4.
| Пристрій | GPS | Компас | Notes |
|---|---|---|---|
| ARK GPS | M9N | ICM42688p | |
| Avionics Anonymous UAVCAN GNSS/Mag | SAM-M8Q | MMC5983MA | |
| CUAV NEO 3 GPS | M9N | IST8310 | |
| CUAV NEO 3 Pro GPS | M9N | RM3100 | |
| CUAV NEO 3X GPS | M9N | RM3100 | |
| CubePilot Here2 GNSS GPS (M8N) | M8N | ICM20948 | |
| Drotek DP0804 | M9N | LIS3MDL | Also see other Drotek u-blox GPS/Compasses |
| Emlid Reach M+ | ✓ | ✗ | Supports PPK. RTK expected. |
| Holybro DroneCAN M8N GPS | M8N | BMM150 | |
| Holybro Micro M8N GPS | M8N | IST8310 | |
| Holybro Nano Ublox M8 5883 GPS | UBX-M8030 | QMC5883 | |
| Holybro M8N GPS | M8N | IST8310 | |
| Holybro M9N GPS | M9N | IST8310 | |
| Holybro DroneCAN M9N GPS | M9N | BMM150 | |
| Hobbyking u-blox Neo-M8N GPS with Compass | M8N | ✓ | |
| LOCOSYS Hawk A1 GNSS receiver | MC-1612-V2b | опціональний | |
| LOCOSYS Hawk R1 | MC-1612-V2b | ||
| LOCOSYS Hawk R2 | MC-1612-V2b | IST8310 | |
| mRo GPS u-blox Neo-M8N Dual Compass | M8N | LIS3MDL, IST8308 | |
| Sky-Drones SmartAP GPS | M8N | HMC5983, IST8310, LIS3MDL | |
| Zubax GNSS 2 | MAX-M8Q | LIS3MDL |
Примітки:
- ✓ або конкретний номер артикулу вказує на те, що функція підтримується, тоді як ✗ або пусте поле вказує на те, що функція не підтримується. "?" означає "невідомо".
- Там, де це можливо і доречно, використовується назва деталі (наприклад, ✓ у колонці GPS вказує на наявність GPS-модуля, але деталь невідома).
- У списку може бути відсутнє деяке зняте з виробництва обладнання, яке все ще підтримується. The original Here has already been removed. Перевірте попередні версії, якщо тут не згадано модуль, який перестали випускати.
Mounting the GNSS/Compass
Mounting the Compass explains how to mount a GNSS module that has a compass (it is the compass part that is affected by electromagnetic radiation).
Налаштування обладнання
Інструкції з підключення GPS (і компаса, якщо він є) зазвичай надаються виробником (принаймні для більш поширеного Автопілотного обладнання).
Контролери серії Pixhawk зазвичай мають чітко позначений порт для підключення GPS, а компас підключається до порту/шини I2C або SPI (залежно від пристрою).
ARK GPS, ARK RTK GPS, Zubax GNSS 2, CUAV C-RTK2, CubePilot Here3 CAN GNSS GPS (M8N) та Avionics Anonymous GNSS/Mag також можна під'єднати через DroneCAN.
WARNING
Зверніть увагу на розкладку контактів при підключенні GPS-модуля. Хоча всі вони сумісні з програмним забезпеченням, існує кілька варіантів розташування пінів.
GNSS конфігурація
Нижче наведено "стандартну" конфігурацію GPS. Додаткова конфігурація для конкретного пристрою може бути надана в PX4 або в документації виробника пристрою (наприклад, Trimble MB-Two > Конфігурація).
WARNING
Протокол GPS, який очікує PX4, за замовчуванням є u-blox (за замовчуванням інші типи GPS, такі як Trimble, Emlid, MTK, не будуть виявлені) Протокол можна налаштувати за допомогою GPS_x_PROTOCOL.
Налаштування основного GPS
Налаштування GPS на Pixhawk відбувається досить легко для користувача - просто підключіть GPS-модуль до порту з міткою GPS і все повинно запрацювати.
:::note Стандартна Конфігурація послідовного порту працює для більшості пристроїв. If you are using the Trimble MB-Two you will need to modify the configuration to explicitly set the rate to 115200 baud. :::
Налаштування додаткового GPS (подвійна система GPS)
Щоб використовувати додатковий GPS, підключіть його до будь-якого вільного порту, а потім виконайте Конфігурацію послідовного порту, щоб призначити GPS_2_CONFIG вибраному порту.
The following steps show how to configure a secondary GPS on the TELEM 2 port in QGroundControl:
- Знайдіть та встановіть параметр GPS_2_CONFIG у значення TELEM 2.
- Відкрийте QGroundControl і перейдіть до розділу Vehicle Setup > Parameters.
- Виберіть вкладку GPS (1), потім відкрийте параметр GPS_2_CONFIG (2) і виберіть TELEM 2 з випадаючого списку (3).
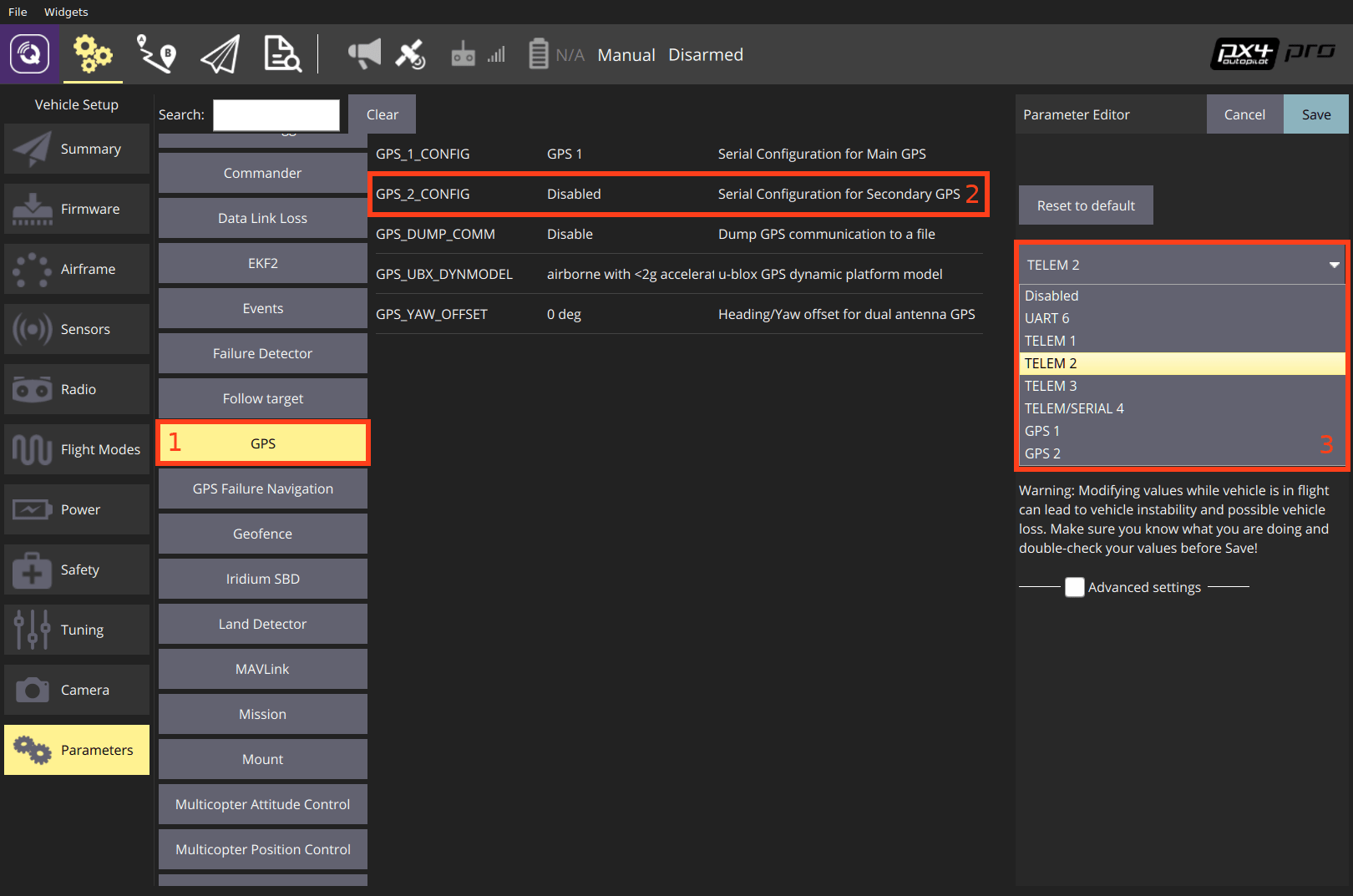
- Перезавантажте апарат, щоб побачити інші параметри.
- Перейдіть на вкладку Serial і відкрийте параметр SER_TEL2_BAUD (швидкість передачі даних у порту
TELEM 2): встановіть для нього значення Auto.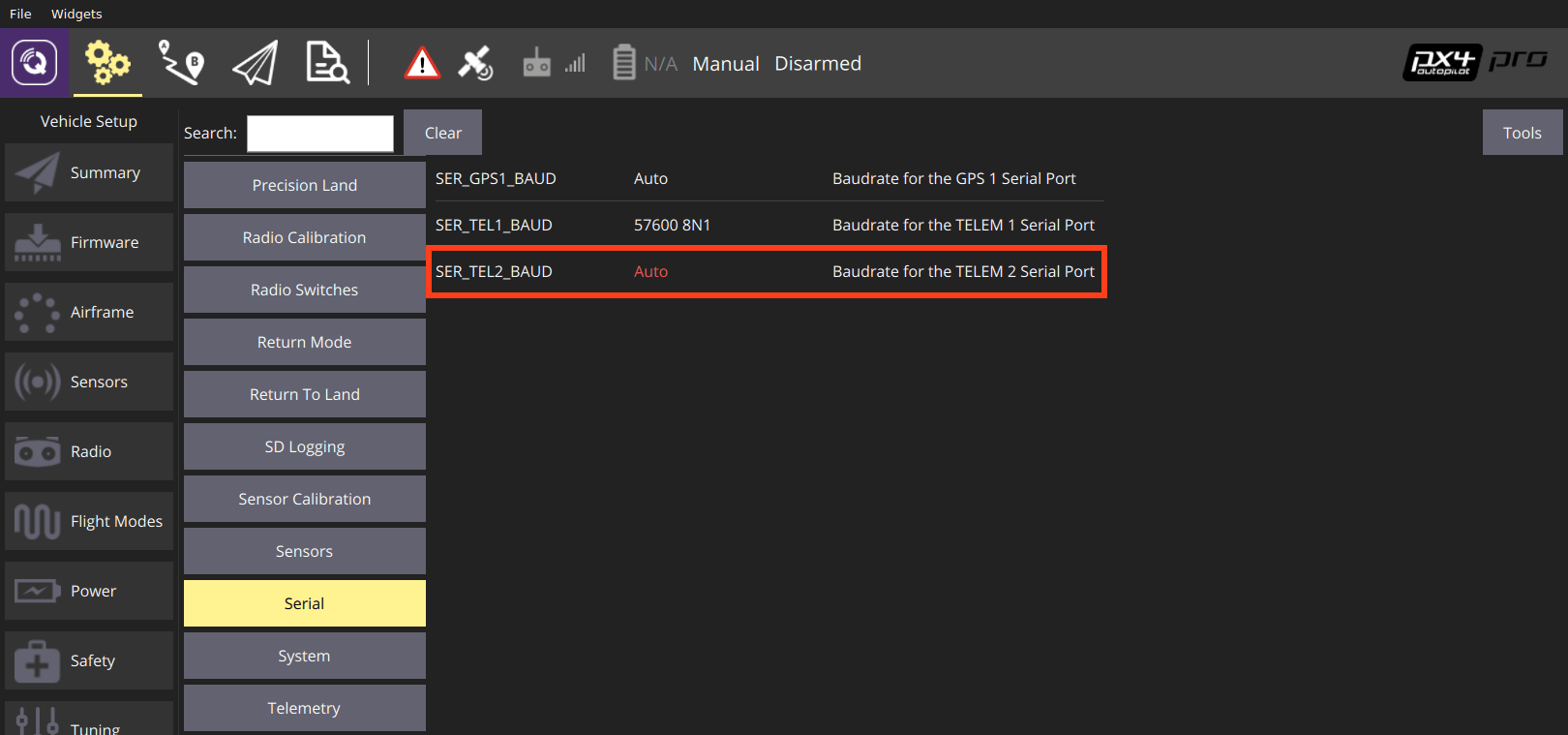
Після налаштування другого GPS-порту:
- Налаштуйте обчислювач ECL/EKF2, щоб об'єднати дані з обох GPS-систем. Докладні інструкції див. тут:Using the ECL EKF > Dual Receivers.
Configuring GPS as Yaw/Heading Source
GPS can be used as a source for yaw fusion when using modules where yaw output is supported by the device. This is documented in RTK GPS > Configuring GPS as Yaw/Heading Source.
Конфігурація компасу
Compass calibration for an included compass part is covered in: Compass Configuration.
Інформація про розробника
- GPS/RTK-GPS
- Компас
- Вихідний код драйверів (Компаси)