Стандартні налаштування
У цьому розділі описано загальну конфігурацію програмного забезпечення та калібрування, необхідні для більшості пристроїв PX4.
Спочатку потрібно завантажити прошивку і вибрати каркас/тип вашого апарату. Більшість інших кроків можна виконувати у довільному порядку, за винятком налаштування, яке має бути виконано в кінці.
Попередні вимоги
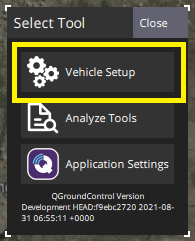
Перед початком роботи вам слід завантажити QGroundControl і встановити його на ваш робочий комп'ютер. Потім відкрийте меню програми QGC (піктограма "Q" у верхньому лівому куті) і виберіть Vehicle Setup у спливаючому вікні Select Tool:
Етапи конфігурації
Вибір прошивки/апарату
Налаштування двигуна/приводу
Калібрування датчика
- Орієнтація сенсорів
- Компас
- Гіроскоп
- Акселерометр
- Level Horizon
- Швидкість польоту (тільки для літаків / VTOL)
:::note Setup for these and other sensors is located in Sensor Hardware & Setup. :::
Налаштування ручного керування
Радіоуправління:
Джойстик/Ґеймпад
Налаштування безпеки
Тюнінг
- Autotune (Рекомендовано для апаратів та платформ, які підтримують цю функцію)
Відеоінструкція
@Якщо вам потрібна допомога з конфігурацією, ви можете звернутися за допомогою на форумі підтримки QGroundControl.
Підтримка
If you need help with the configuration you can ask for help on the QGroundControl Support forum.
Дивіться також
Периферія контролера польоту - налаштування конкретних датчиків, опціональних датчиків, актуаторів тощо.
Розширена конфігурація - заводське калібрування/OEM, налаштування додаткових функцій, менш поширені конфігурації.
Конфігурація/налаштування, що залежать від апарату: