BlueROV2 (UUV)
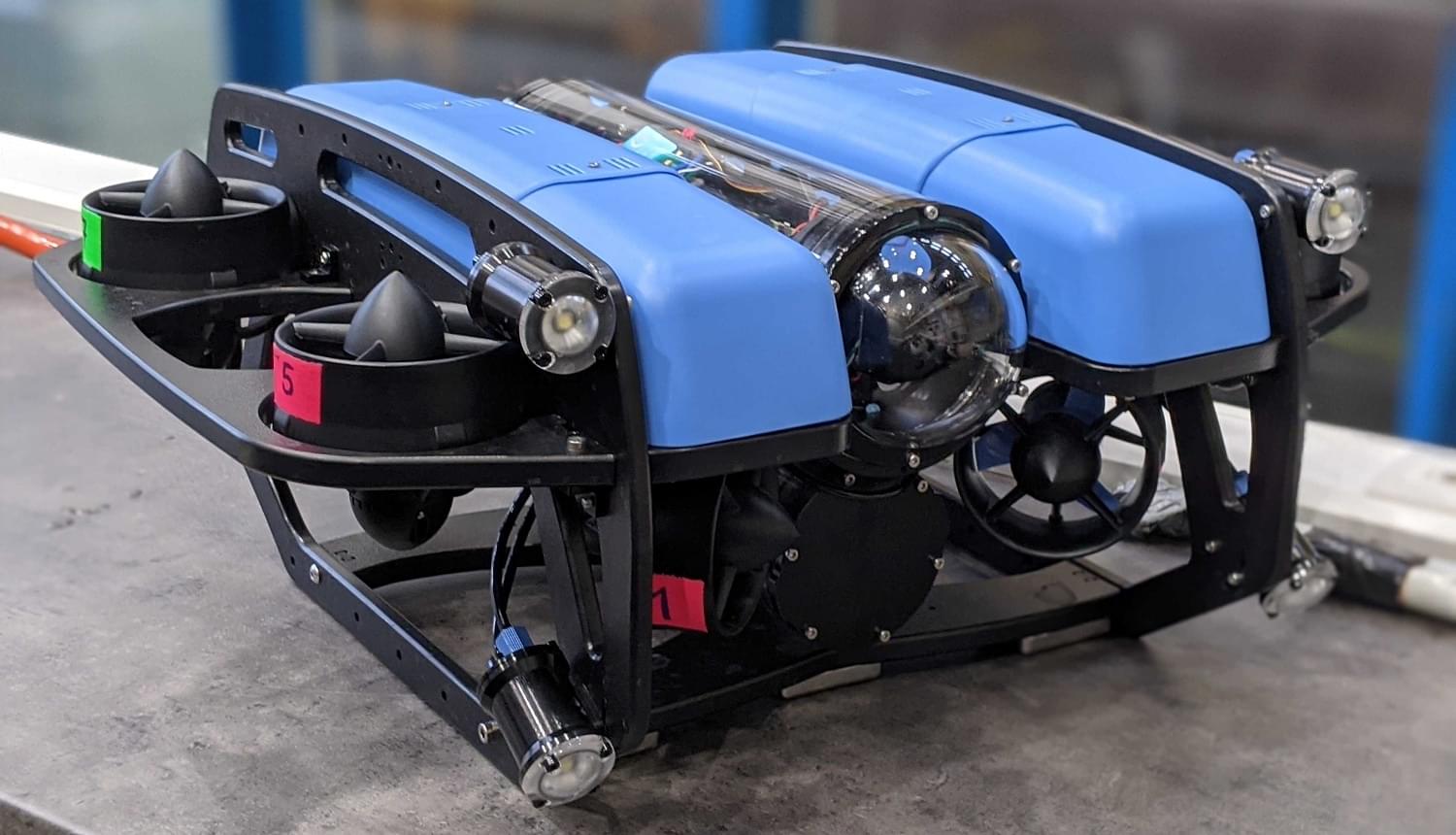
PX4 v1.12BlueROV2 - це доступний високопродуктивний підводний апарат, який ідеально підходить для інспекцій, досліджень та пригод.
PX4 забезпечує експериментальну підтримку восьмипропелерної конфігурації з векторним керуванням, відомої як BlueROV2 Heavy Configuration.
Де купити
BlueROV2 + Комплект модернізації для важкої конфігурації BlueROV2
Відповідність двигунів/підключення
Мотори повинні бути підключені до контролера польоту відповідно до стандартних інструкцій, наданих BlueRobotics для цього транспортного засобу.
Транспортний засіб буде відповідати конфігурації, описаній в Довіднику з конструкції літальних апаратів:

- MAIN1: motor 1 CCW, bow starboard horizontal, , propeller CCW
- MAIN2: motor 2 CCW, bow port horizontal, propeller CCW
- MAIN3: motor 3 CCW, stern starboard horizontal, propeller CW
- MAIN4: motor 4 CCW, stern port horizontal, propeller CW
- MAIN5: motor 5 CCW, bow starboard vertical, propeller CCW
- MAIN6: motor 6 CCW, bow port vertical, propeller CW
- MAIN7: motor 7 CCW, stern starboard vertical, propeller CW
- MAIN8: motor 8 CCW, stern port vertical, propeller CCW
Airframe Configuration
BlueROV2 не йде з предвстановленою версією з PX4. Вам потрібно:
- Встановіть прошивку PX4
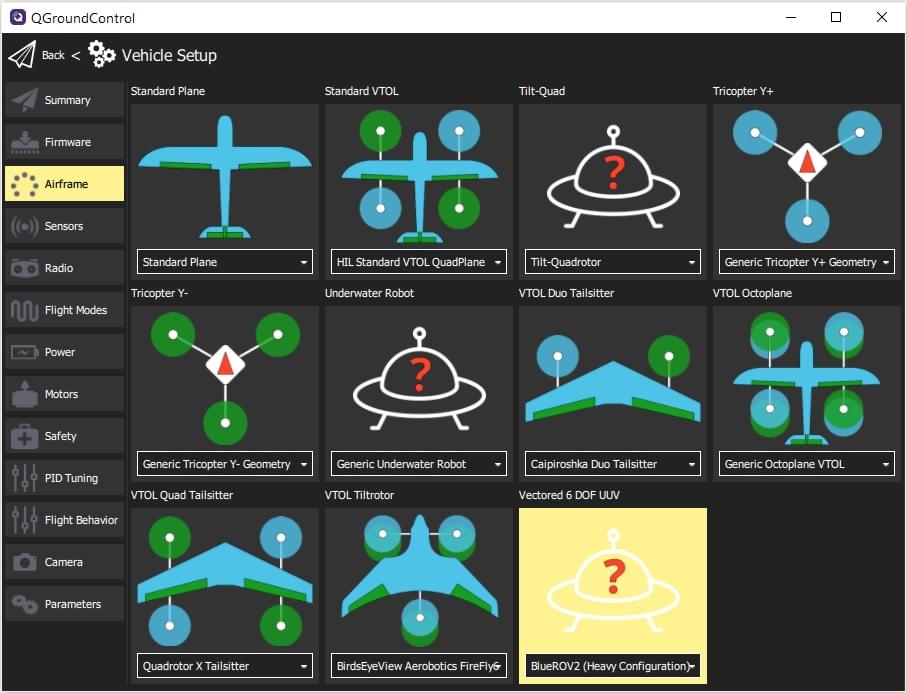
- Налаштуйте планер. Вам потрібно буде вибрати "BlueROV2 Важка конфігурація" як показано: