Зовнішнє керування
WARNING
Зовнішнє управління небезпечно. Це відповідальність розробника переконатися в належній підготовці, тестуванні та заходах безпеки перед польотом.
Ідея за зовнішнього контролю полягає в можливості керування стеком керування PX4 за допомогою програмного забезпечення, яке виконується поза автопілотом. Це зроблено за допомогою протоколу MAVLink, зокрема SET_POSION_TARGET_LOCAL_NED та SET_ATTITUDE_TARGET повідомлень.
Налаштування прошивки з зовнішнім контролем
Є дві речі, які ви маєте налаштувати на стороні прошивки перед початком розробки.
Зв'язування RC перемикача з активацією режиму offboard.
Щоб зробити це, завантажте параметри в QGroundControl і знайдіть параметр RC_MAP_OFFB_SW до якого ви можете призначити канал RC, яким ви хочете активувати offboard-режим. It can be useful to map things in such a way that when you fall out of offboard mode you go into position control.
Хоча цей крок не є обов'язковим так як ви можете активувати offboard режим за допомогою MAVLink повідомлення. Ми вважаємо цей метод набагато безпечнішим.
Увімкніть інтерфейс комп'ютера-компаньйона
Увімкніть MAVLink у послідовному порті, який ви підключаєтеся до компаньйону (див. Комп'ютер компаньйон).
Налаштування обладнання
Зазвичай, є три способи створення offboard з'єднання.
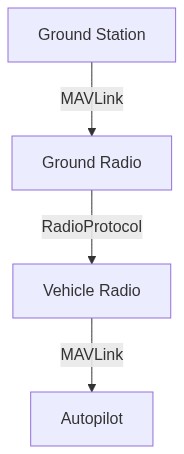
Послідовні радіомодулі
Один підключений до UART порту автопілота
Один підключений до наземної станції
Приклад радіомодулів включає:
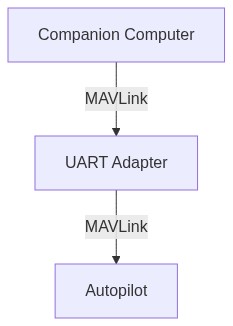
On-board processor
A small computer mounted onto the vehicle, connected to the autopilot through a serial port or Ehthernet port. There are many possibilities here and it will depend on what kind of additional on-board processing you want to do in addition to sending commands to the autopilot. Some examples are provided in Companion Computers.
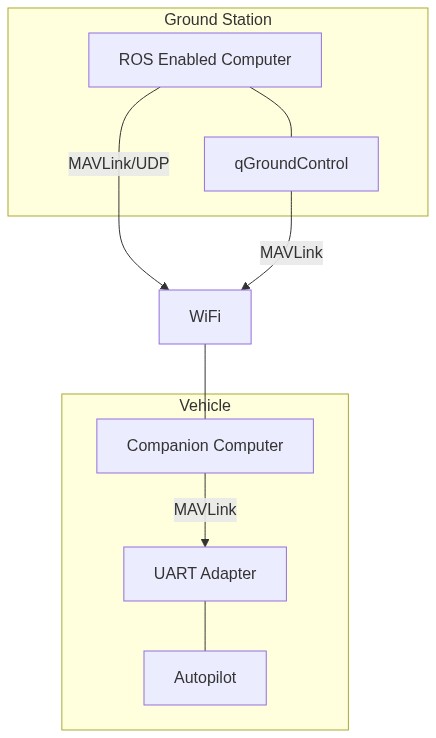
On-board processor and wifi link to ROS (Recommended)
A small computer mounted onto the vehicle connected to the autopilot through a UART to USB adapter while also having a WiFi link to a ground station running ROS. Це може бути будь-який з комп'ютерів зазначеної секції в поєднанні з Wi-Fi адаптером.