Ручний політ
У цьому розділі пояснюються основи керування апаратом за допомогою Радіопередавача у ручному режимі або режимі польоту з автопілотом (про автономний політ див.: Місії).
:::note Перед першим польотом прочитайте наші Рекомендації щодо першого польоту. :::
Увімкнення апарату
Перед тим, як ви зможете літати апаратом, його спочатку потрібно увімкнути. Це подасть живлення на всі мотори та приводи; у мультикоптера це запустить обертання пропелерів.
Щоб увімкнути дрон:
- Спочатку вимкніть перемикач безпеки.
- Використайте команду увімкнення для вашого апарата - переведіть стік газу в нижній правий кут.
- Або налаштуйте перемикач увімкнення/вимкнення.
- Ви також можете увімкнути апарат в QGroundControl (PX4 не вимагає радіокерування для автономного польоту).
TIP
Апарат не буде увімкнено, поки він не буде відкалібрований/налаштований та не отримає локу позиції. Сповіщення про стан апарата (включаючи світлодіоди на апараті, аудіосповіщення та оновлення в QGroundControl) можуть повідомити вас, коли апарат готовий до польоту (та допомогти вам з'ясувати причину, коли він не готовий до польоту). :::
:::note Апарат (за замовчанням) автоматично вимкнеться (вимкне мотори), якщо ви занадто довго готуєтесь до зльоту! Це заходи безпеки, щоб гарантувати, що апарати повертаються до безпечного стану, коли не використовуються. :::
:::note Апарат VTOL може бути увімкнений лише в режимі мультикоптера (за замовчанням - увімкнення в режимі літака може бути активоване за допомогою CBRK_VTOLARMING). :::
Зліт
Зліт мультикоптера
Пілоти мультикоптерів (та VTOL у режимі мультикоптера) можуть злітати вручну, активувавши будь-який ручний режим, увімкнувши апарат, а потім піднявши стік газу до рівня, коли мотори дадуть достатньо тяги для підняття з землі. In Position mode or Altitude mode the throttle stick has to be increased to above 62.5% to command a climb rate and make the vehicle leave the ground. Above this value all controllers are enabled and the vehicle goes to the throttle level required for hovering (MPC_THR_HOVER).
Throw Launch is also supported, in which the vehicle activates motors after it detects that it has reached the apex of a throw, and then operates according to its current mode.
Alternatively the takeoff can performed using the automatic Takeoff mode.
:::note The vehicle may disarm if you take too long to take off after arming (tune the timeout using COM_DISARM_PRFLT). :::
:::note The Failure Detector will automatically stop the engines if there is a problem on takeoff. :::
Fixed-wing Takeoff
:::note Taking off manually (and landing) is not easy! We recommend using with the automatic modes instead, especially for inexperienced pilots.
Stabilized mode, Acro mode or Manual mode mode are recommended for manual takeoff. Position mode and Altitude mode can also be used, but it is important to accelerate the vehicle sufficiently before bringing them airborne — strong thrust if hand-launched, long runway phase for runway takeoff (this is required because the controller in these modes can prioritize airspeed over altitude tracking).
Manual takeoffs with hand-launched planes:
- Ramp up the motor and throw the vehicle horizontally.
- Do not pitch up too fast as this may stall the plane.
- A good vehicle trim is crucial for safe hand-launch takeoffs, because if the vehicle doesn't fly level there is only a very short time for the pilot to react before the vehicle crashes!
Manual takeoffs with runway-launched planes:
- Accelerate on the runway until the speed is sufficient for takeoff.
- If the plane has a steerable wheel, use the yaw stick to keep it on course.
- Once the speed is sufficient pull up the nose with the pitch stick.
Automatic takeoffs are possible in the Mission mode or Takeoff mode (FW). The pilot can take over manual control over the vehicle at any moment during the takeoff process or after it by changing into a manual flight mode.
Landing
Multicopter Landing
Multicopters can be landed in any manual mode. Make sure to keep the throttle stick pulled down after touching down until the motors have switched off.
Note that vehicles automatically disarm on landing by default:
- Use COM_DISARM_LAND to set the time to auto-disarm after landing (or disable it altogether).
- Manually disarm by putting the throttle stick in the bottom left corner.
There is also the option to let the vehicle land autonomously. For that engage the Land mode or Return mode.
:::note If you see the vehicle "twitch" during landing (turn down the motors, and then immediately turn them back up) this is probably caused by a poor Land Detector Configuration (specifically, a poorly set MPC_THR_HOVER). :::
Fixed-wing Landing
Stabilized mode, Acro mode or Manual mode are recommended for landing (just as they are for takeoff). In these modes the pilot has full control over the motor thrust, which is required to perform a manual flaring maneuver when close to the ground (raising the vehicle nose without increasing throttle). You should perform the landing in headwind to reduce the groundspeed before touching down.
For auto landings you should use a Fixed-Wing Mission Landing. This landing is defined in a mission, and can be used in either Mission or Return modes.
The automatic Land mode mode is not recommended unless absolutely necessary, as it cannot account for underlying terrain.
Note that vehicles automatically disarm on landing by default:
- Use COM_DISARM_LAND to set the time to auto-disarm after landing (or disable it altogether).
- Manually disarm by putting the throttle stick in the bottom left corner.
Flight Controls/Commands
All flying, including takeoff and landing, is controlled using the 4 basic commands: roll, yaw, pitch and throttle.
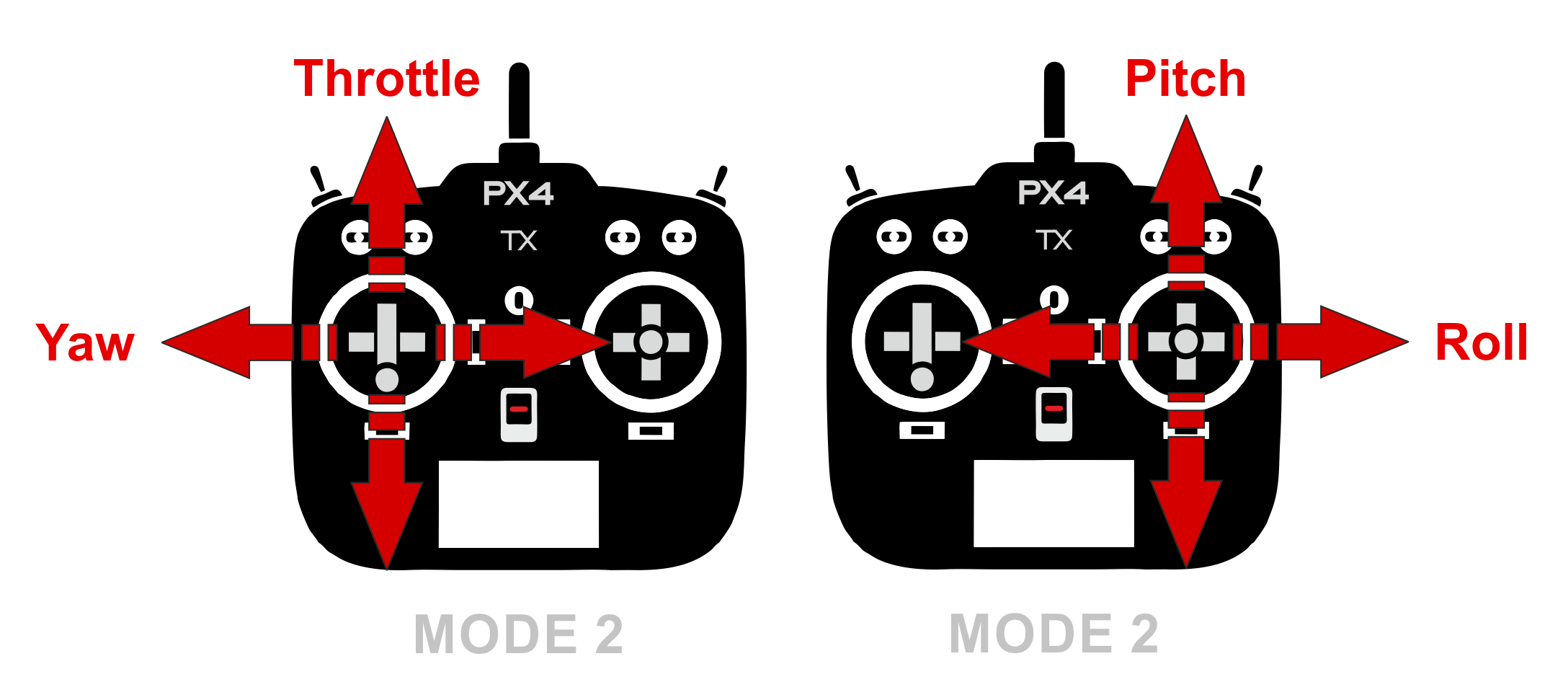
In order to control your aircraft you need to understand how the basic Roll, Pitch, Yaw and Throttle commands affect movement in 3D space. This differs depending on whether you're controlling a forward-flying aircraft like a plane, or a "hover aircraft" like a multicopter.
Hover Aircraft
Hover aircraft (Copter, VTOL in hover mode) respond to the movement commands as shown below:
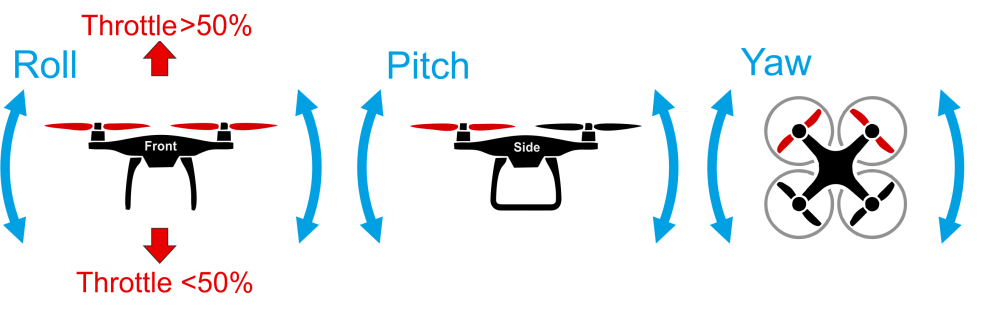
- Pitch => Forward/back.
- Roll => Left/right.
- Yaw => Left/right rotation around the centre of the frame.
- Throttle => Changed altitude/speed.
Forward-flying Aircraft
Forward-flying aircraft (planes, VTOL in forward flight) respond to the movement commands as shown below:
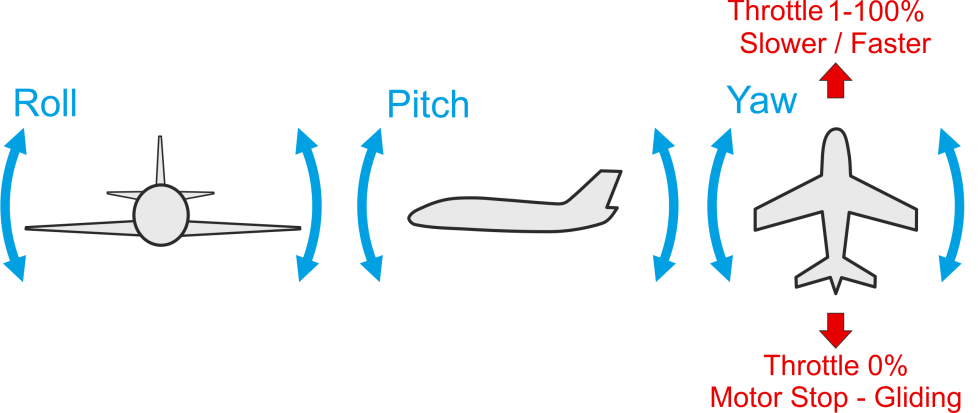
- Pitch => Up/down.
- Roll => Left/right and a turn.
- Yaw => Left/right tail rotation and turn.
- Throttle => Changed forward speed.
:::note The best turn for airplanes is called a coordinated turn, and is performed using roll and little yaw at the same time. This maneuver requires experience! :::
Assisted Flight
Even with an understanding of how the vehicle is controlled, flight in fully manual mode can be quite unforgiving. New users should configure their transmitter to use flight modes where the autopilot automatically compensates for erratic user input or environmental factors.
The following three modes are highly recommended for new users:
- Stabilized - Vehicle hard to flip, and will level-out if the sticks are released (but not hold position)
- Altitude - Climb and drop are controlled to have a maximum rate.
- Position - When sticks are released the vehicle will stop (and hold position against wind drift)
:::note You can also access automatic modes through the buttons on the bottom of the QGroundControl main flight screen. :::